Mapping method for C-space line obstacles of multi-arm robot
A mapping method and robot technology, applied in the directions of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as large amount of calculation, and achieve the effect of reducing difficulty and calculation amount, and avoiding collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
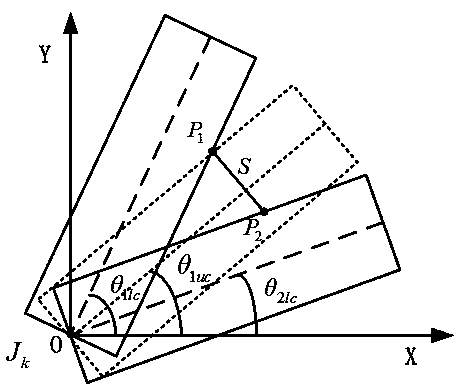
[0017] First of all, we need to understand the concept of critical collision joint angle, which refers to the joint angle formed when the connecting rod L collides with the feature point P, and the joint angle formed when the connecting rod L is in contact with the feature point P when it rotates clockwise is called the upper criticality Collision joint angle; the joint angle formed by contacting the feature point P when the connecting rod L rotates counterclockwise is called the lower critical collision joint angle. The entire C-space obstacle boundary of a point can be described by the upper and lower critical collision joint angles.
[0018] Such as figure 1 As shown, assume that the joint value of the front end of the connecting rod L has been determined, and the joint J k The range of motion is [-π, π], the connecting rod L collides with the line segment S, and the two endpoints of the line P 1 , P 2 As a feature point, transforming the situation into a collision bet...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap