Sign language recognition method based on surface myoelectric sensor and nine-axis sensor
A nine-axis sensor and recognition method technology, applied in the field of sign language recognition based on surface electromyography sensors and nine-axis sensors, can solve the problems of inconvenient wearing of data glove recognition technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
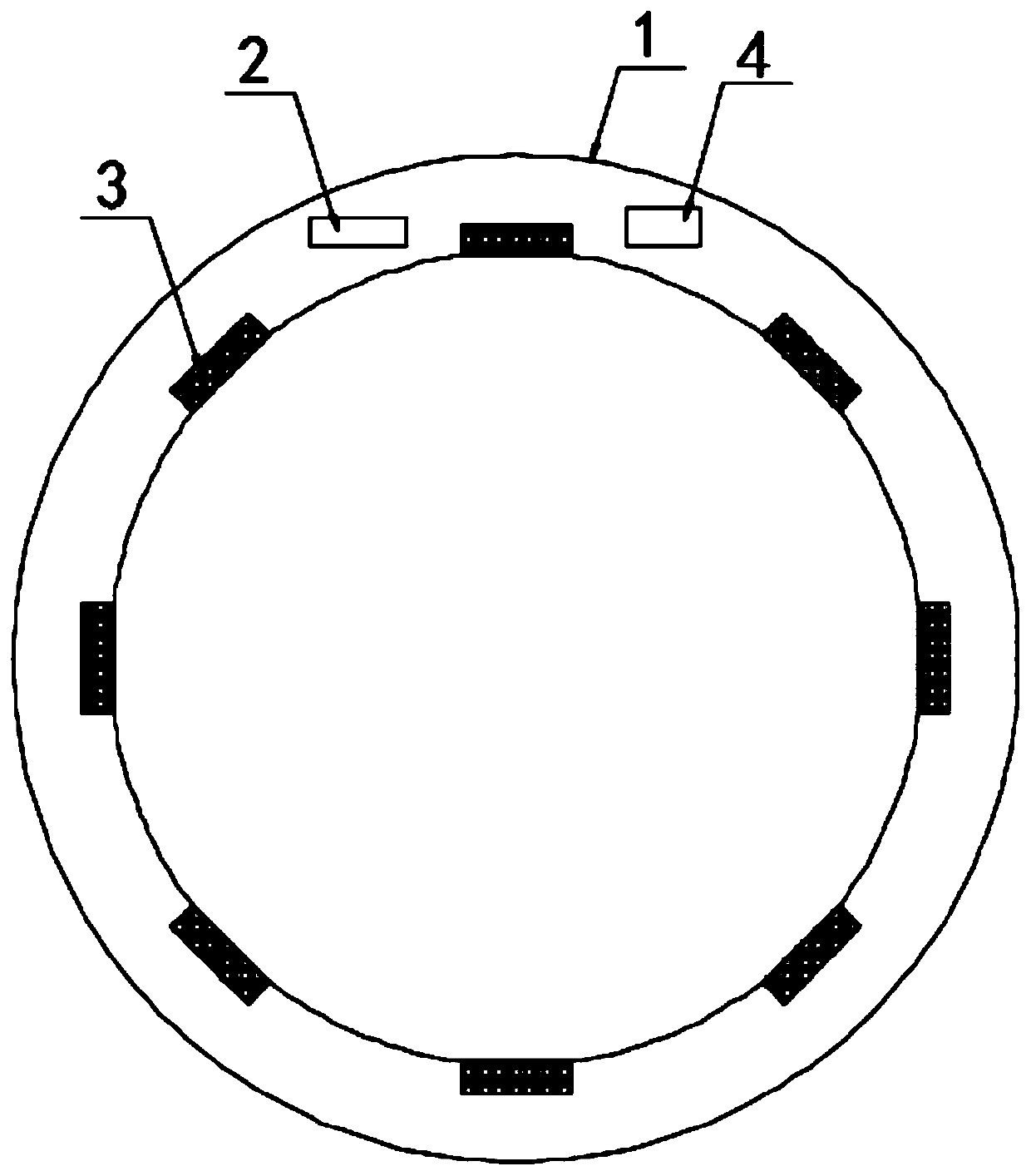
[0159] according to Figure 1-2 A kind of sign language recognition method based on surface electromyography sensor and nine-axis sensor shown, comprises the arm band 1 that is worn on the arm, and described arm band 1 is provided with a nine-axis sensor 2, eight myoelectric sensors 3 and A bluetooth receiver 4, the nine-axis sensor 2 is used to detect the movement trajectory and orientation of the arm, the surface myoelectric sensor 3 is used to detect the myoelectric signals of different gestures, the armband 1 is connected through the bluetooth receiver 4 Terminal equipment, sign language recognition methods are as follows:
[0160] Step 1. First, wear the armband 1 on the arm, collect all the raw sign language data through the training of the myoelectric sensor 3 and the nine-axis sensor 2, and send it to the terminal device through the Bluetooth receiver 4;
[0161] Step 2. Obtain effective motion data of the gesture to be recognized by detecting the signal starting poin...
Embodiment 2
[0167] according to figure 1 Shown is a sign language recognition method based on a surface electromyography sensor and a nine-axis sensor, eight of the myoelectric sensors 3 are evenly embedded in the inner wall of the armband 1, and the nine-axis sensor 2 and the Bluetooth receiver 4 are arranged on the Inside the armband 1, the myoelectric sensor 3 and the nine-axis sensor 2 are connected to the bluetooth receiver 4 through the A / D sensor, and the bluetooth receiver 4 is communicatively connected to a terminal device, and the terminal device includes a mobile phone or a computer;
[0168] The action potential waveform of the muscle motor unit (by muscle fiber cells) is detected by the myoelectric sensor 3, and the nine-axis sensor 2 includes a three-axis accelerometer, a three-axis gyroscope and a three-axis magnetometer, and the three-axis accelerometer and the three-axis gyroscope respectively judge The acceleration direction and speed of the arm and the current rotation ...
Embodiment 3
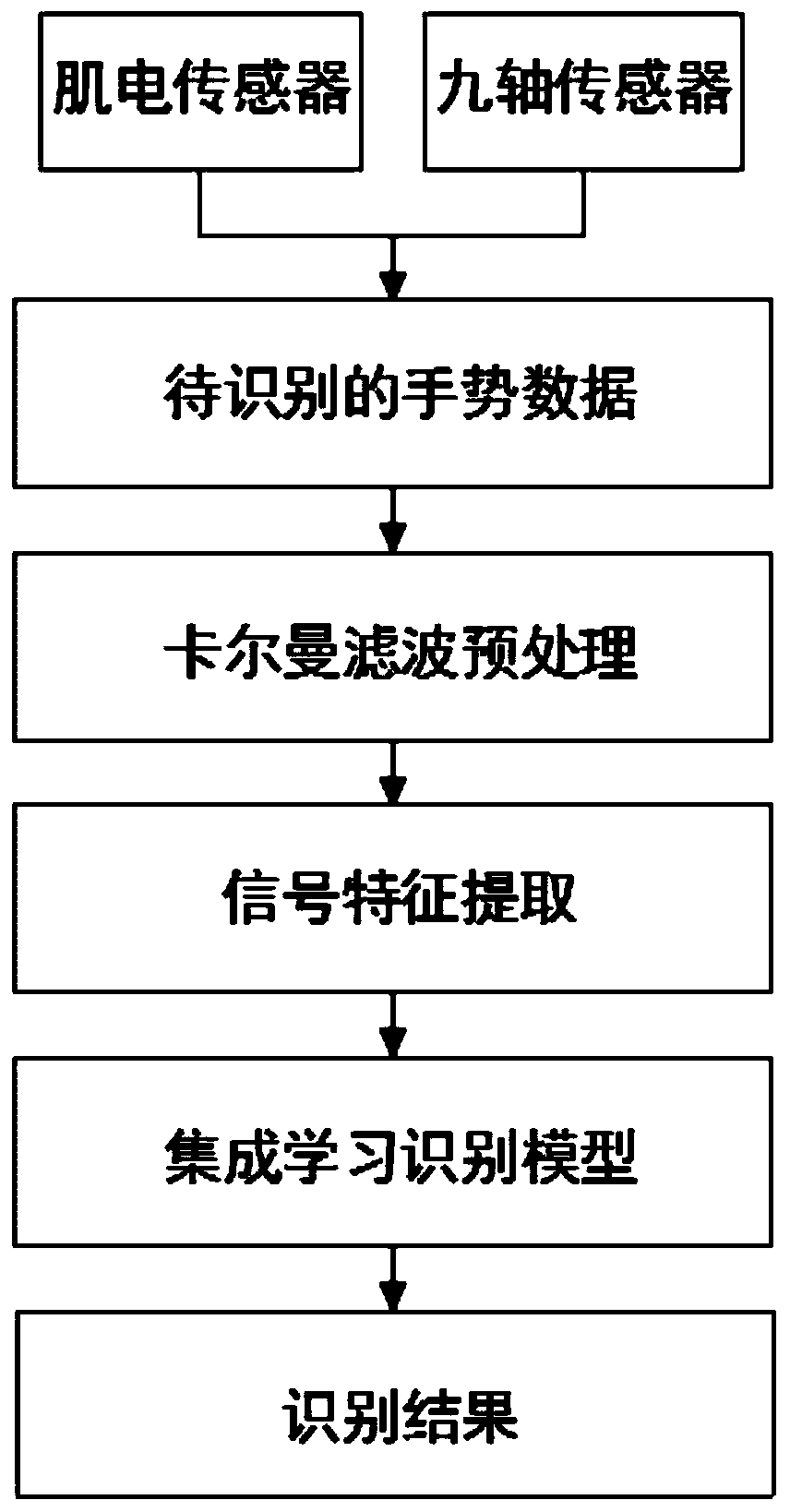
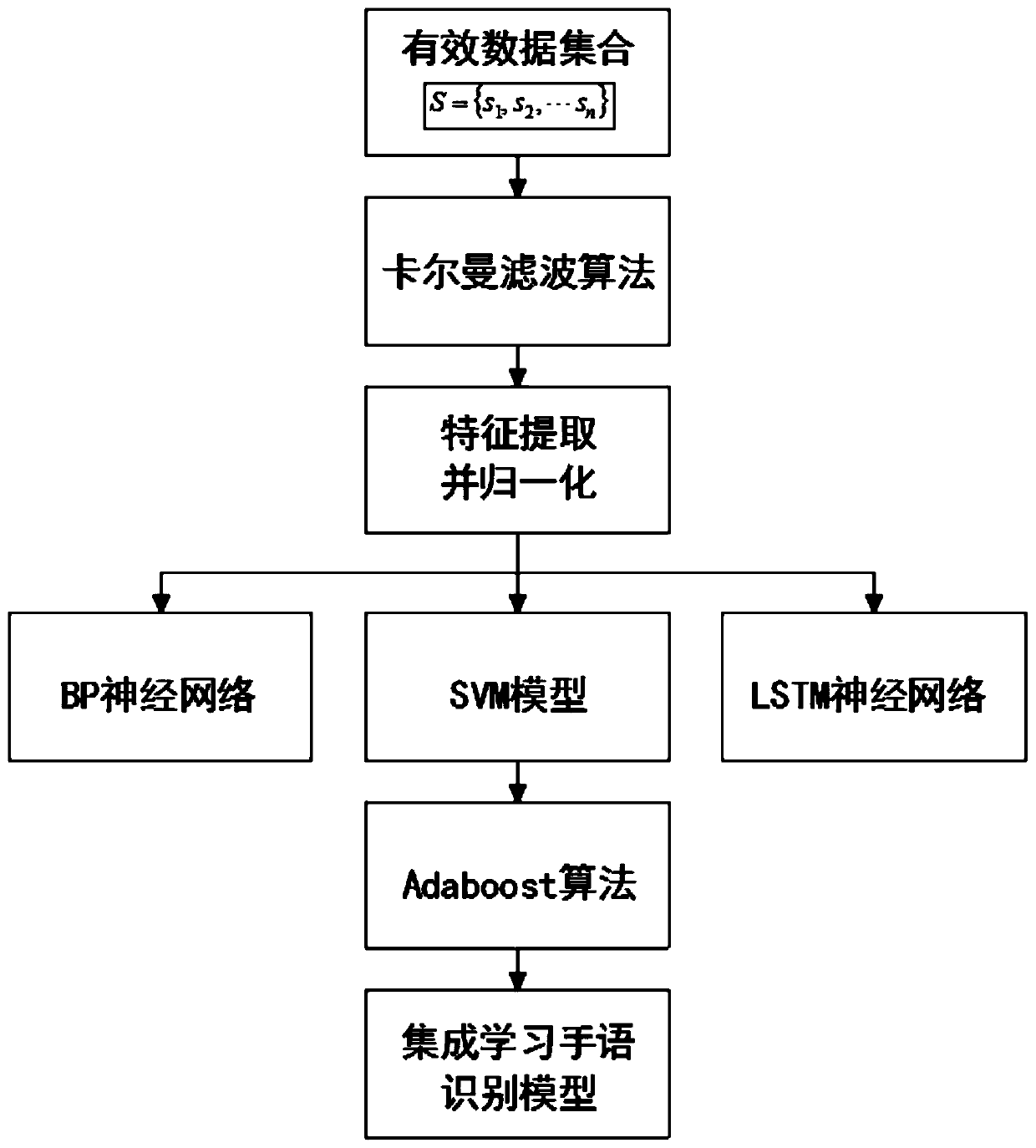
[0170] according to figure 2 A sign language recognition method based on a surface electromyography sensor and a nine-axis sensor is shown, and the implementation of the specific recognition method is as follows:
[0171] Step 1, collecting all raw data through the myoelectric sensor 3 and the nine-axis sensor 2;
[0172] In the process of wearing the armband 1, the terminal device will read the real-time data of the eight myoelectric sensors 3 and the nine-axis sensor 2 through the low-power Bluetooth 4.0 receiver, and display them on the terminal device for processing;
[0173] Step 2, collect effective motion data of the gesture to be recognized by detecting the signal starting point based on sample entropy;
[0174] Sample Entropy (Sample Entropy, SampEn), measures the probability of generating new patterns in signals by measuring the complexity of time series; SampEn overcomes data deviation, has stronger anti-noise ability and excellent consistency, and uses less data ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More