

Calibration method for spatial position of laser beam
A calibration method and laser beam technology, applied in the direction of using optical devices, measuring devices, instruments, etc., can solve the problems of inability to determine the spatial position, not suitable for wide application, etc., and achieve the effect of simple method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
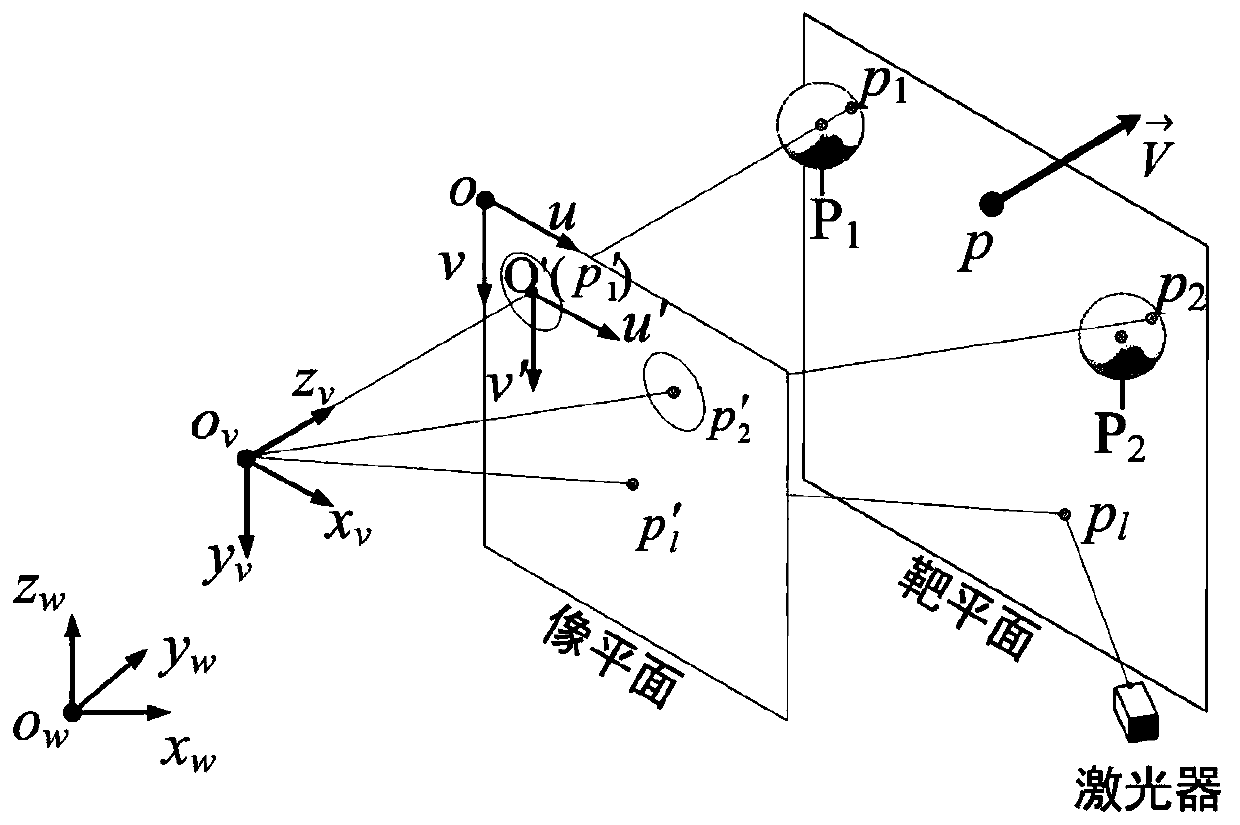
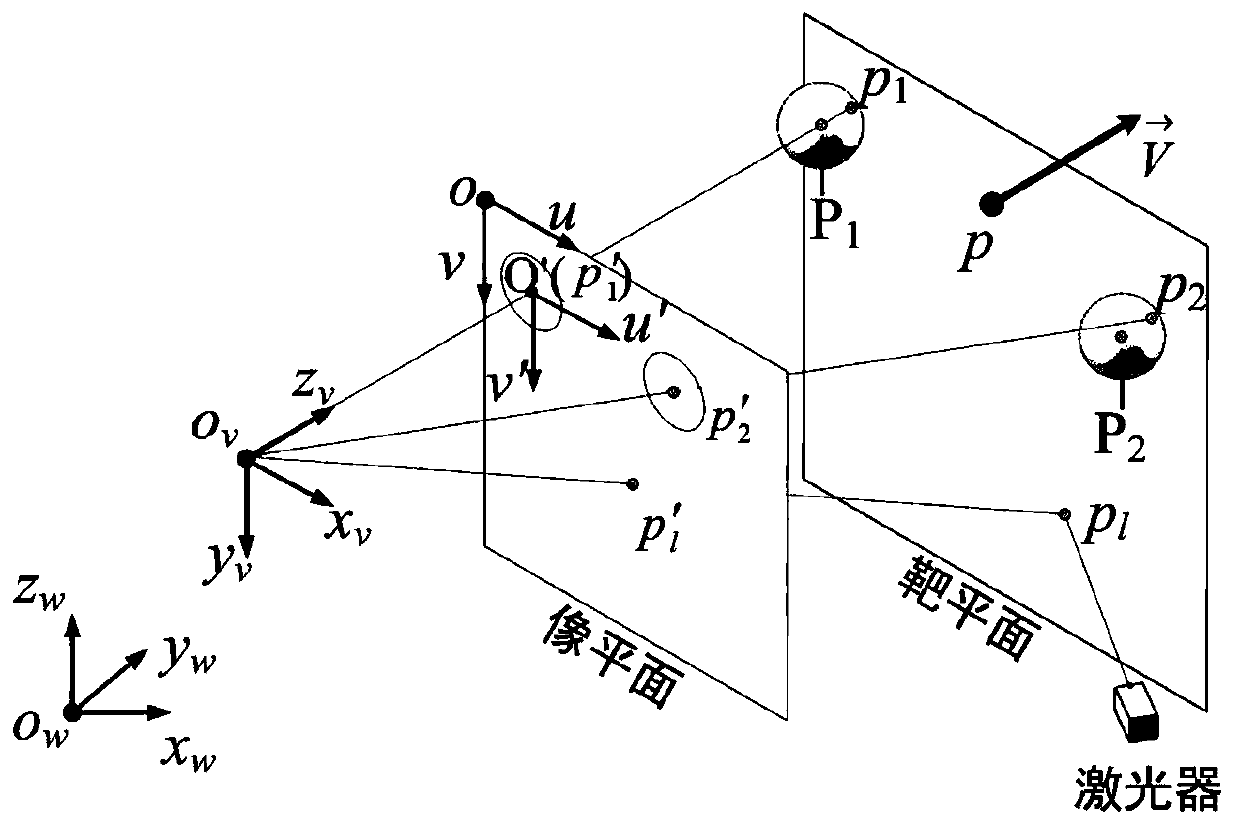
[0020] Such as figure 1 As shown, the point p on the target plane 1 ,p 2 ,p l are projected onto the image plane as points p 1 ', p' 2 ,p l '.
[0021] In order to express more clearly, the coordinate representation of each point in each coordinate system is shown in Table 1:
[0022] Table 1
[0023]
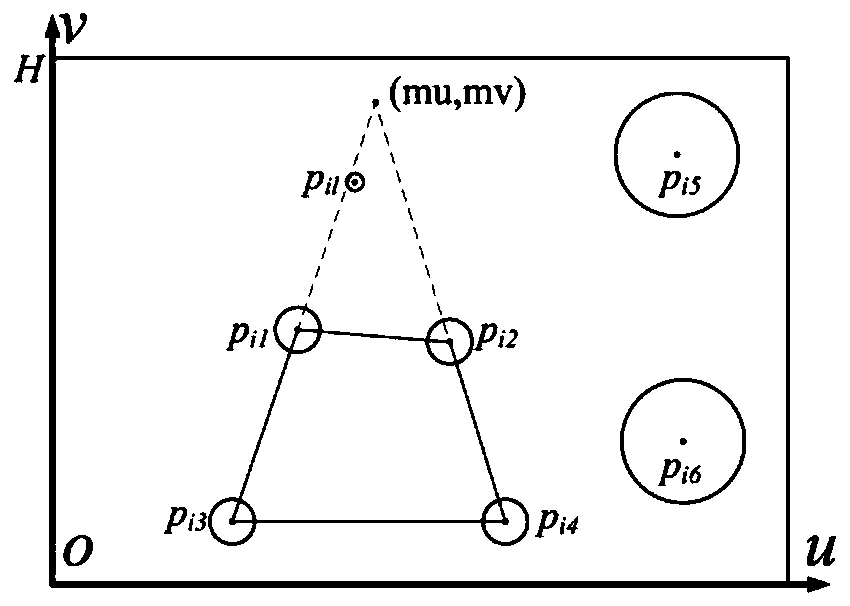
[0024] (1) A camera with a telecentric lens and a target plane are used to build a laser beam calibration device. The camera is facing the target plane. Two target spheres and four equal-diameter shadow circles are set on the target plane. There is no special requirement for their position distribution. It only needs to meet the line connecting the center of the shadow circle to form a square, and both the target ball and the shadow circle are within the field of view of the camera;
[0025] (2) Take the coordinate system of the three-coordinate measuring ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More