Industrial robot zero point calibration method based on dynamic learning
An industrial robot, zero-point calibration technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of expensive calibration methods and devices, complex calibration process, etc., to shorten the calibration time, simplify the calibration process, and improve the calibration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to better introduce the method provided by the present invention, the technical solutions of the present invention will be described below in conjunction with the accompanying drawings, tables and specific embodiments.
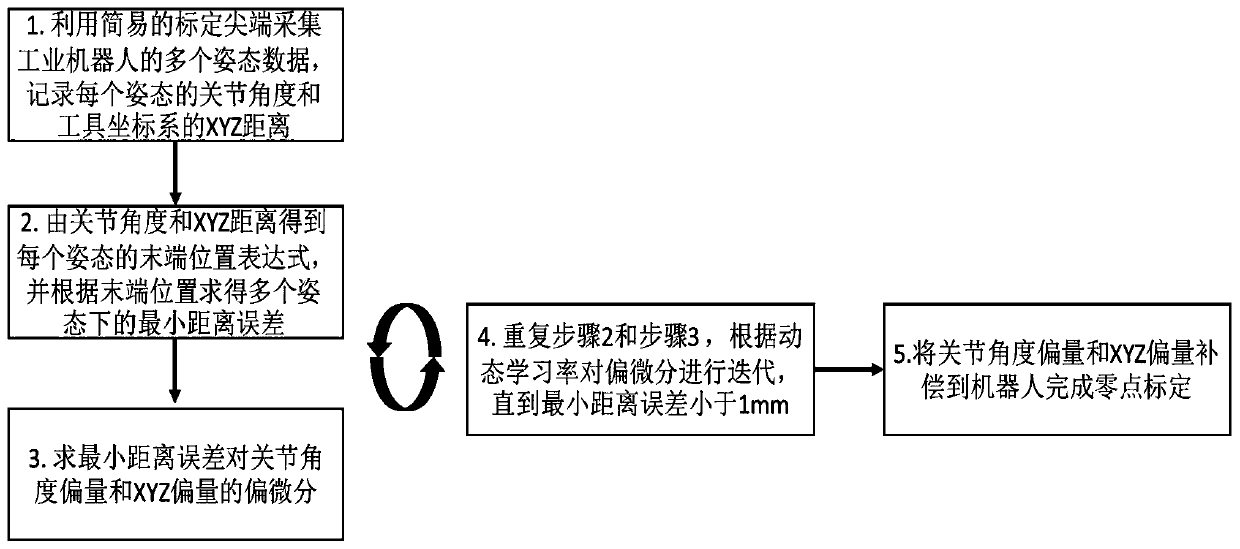
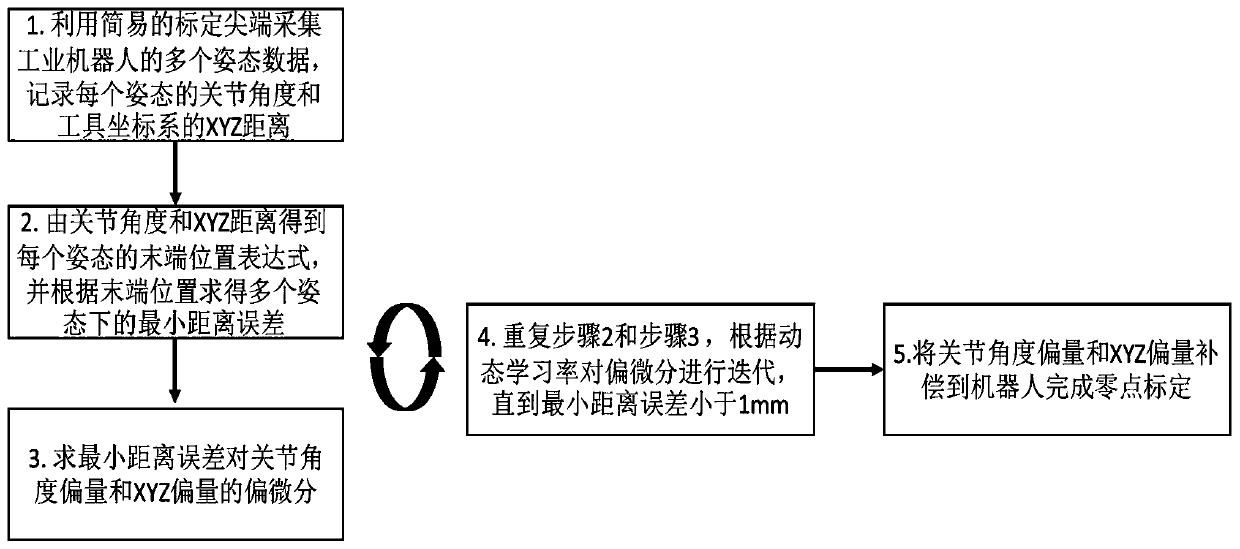
[0032] Such as figure 1 As shown, the present invention provides a method for zero point calibration of industrial robots based on dynamic learning, comprising the following steps:
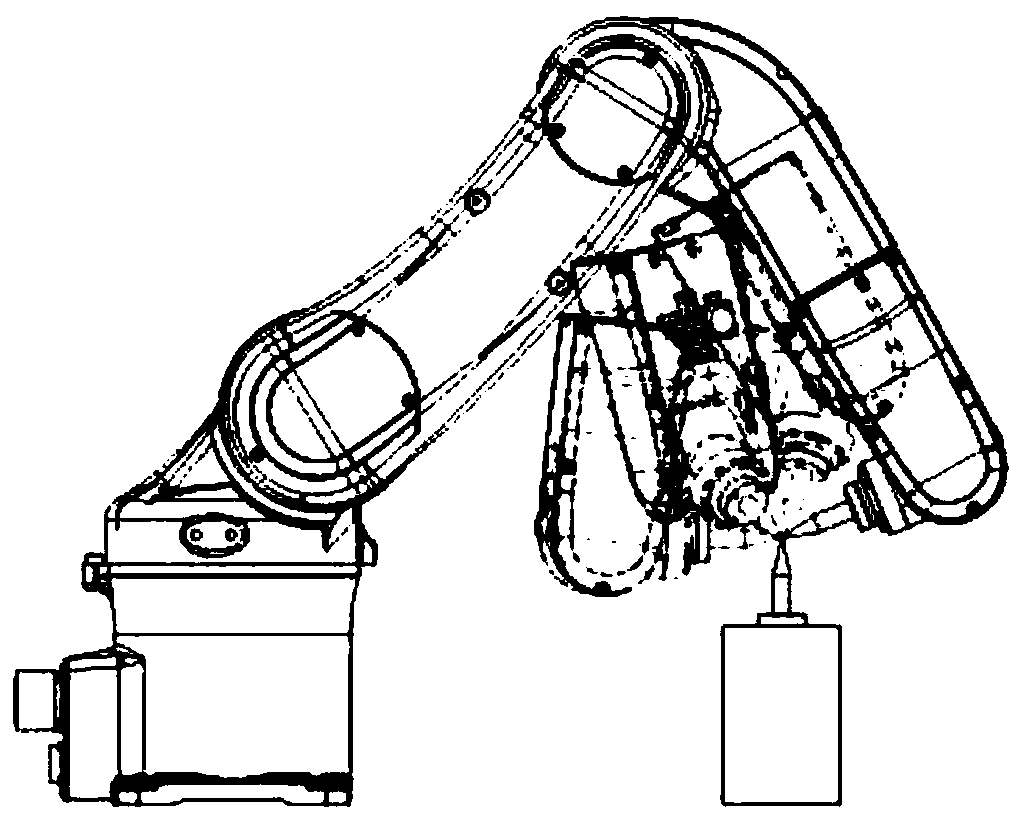
[0033] 1) Use a simple calibration tip to collect multiple pose data of the industrial robot, and record the joint angle of each pose and the XYZ distance of the tool coordinate system;
[0034] 2) Obtain the terminal position expression of each posture from the joint angle and XYZ distance, and obtain the minimum distance error under multiple postures according to the terminal position;
[0035] 3) Find the partial differential of the minimum distance error to the joint angle offset and XYZ offset;
[0036] 4) Repeat step 2) and step 3), and iterate the partial ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com