

Creeping mode pump displacement control method based on optimal overall efficiency
A technology of comprehensive efficiency and control method, applied in the field of peristaltic mode pump displacement control based on optimal comprehensive efficiency, to achieve real control effect, reduce response difference characteristics, and solid and reliable theoretical basis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] The present invention is described in detail below in conjunction with accompanying drawing:
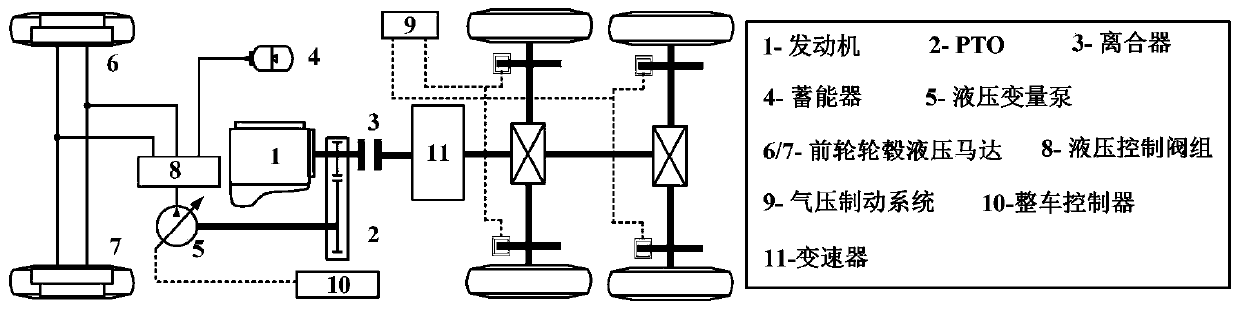
[0058] refer to figure 1 , the hub hydraulic creeping mode pump displacement control method described in the present invention is divided into five steps: Step 1 is to determine the pump swash plate opening search interval, based on any permissible creeping speed, after determining the current wheel position After the required power, wheel hub hydraulic motor speed and closed-loop hydraulic pressure difference, the search range of variable pump swashplate opening can be further determined; Step 2 is to determine the engine demand power corresponding to the pump swashplate opening, combined with the current closed-loop hydraulic pressure difference and related volumetric efficiency of the engine and variable pump to obtain the required power of the engine under the corresponding pump swashplate opening; step 3 is to determine the engine operating point, based on the current hub...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More