

Under-ice detection system based on capture remotely-operated vehicle (ROV) and suitable for ice hole laying and recovery
A detection system and ice hole technology, which is applied in underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of limited endurance of AUV, limited detection time and range, and inability to deploy and recover, so as to improve propulsion efficiency. , Improve the detection range and reduce the effect of forward resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
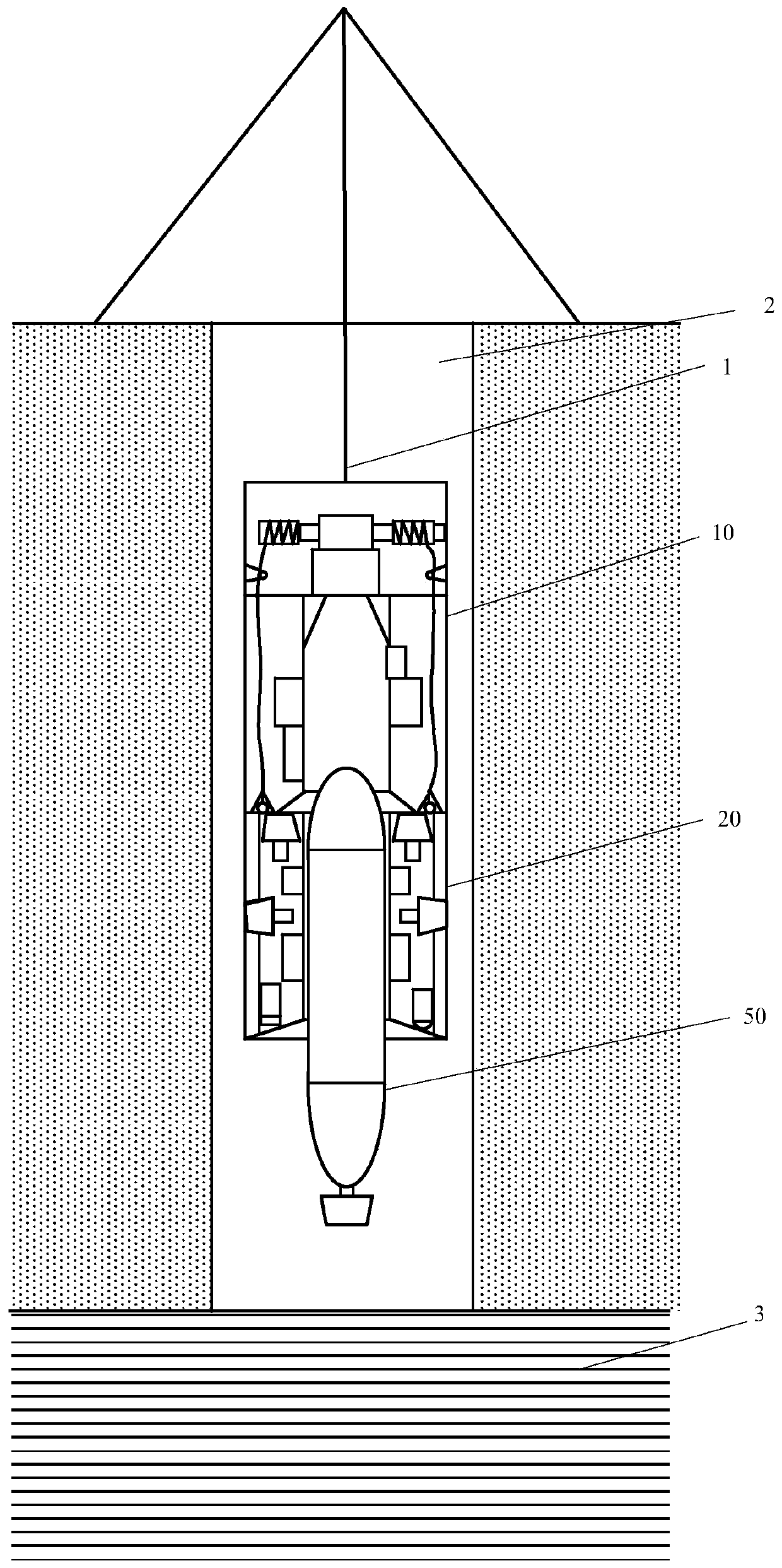
[0038] see figure 1 , this embodiment provides an under-ice detection system based on capturing ROVs suitable for deployment and recovery of ice holes, which can enter the water 3 through ice holes 2 with limited aperture, including
[0039] The load-bearing cable 1 is used to hang in the ice hole 2 to lift and lower the under-ice detection system;
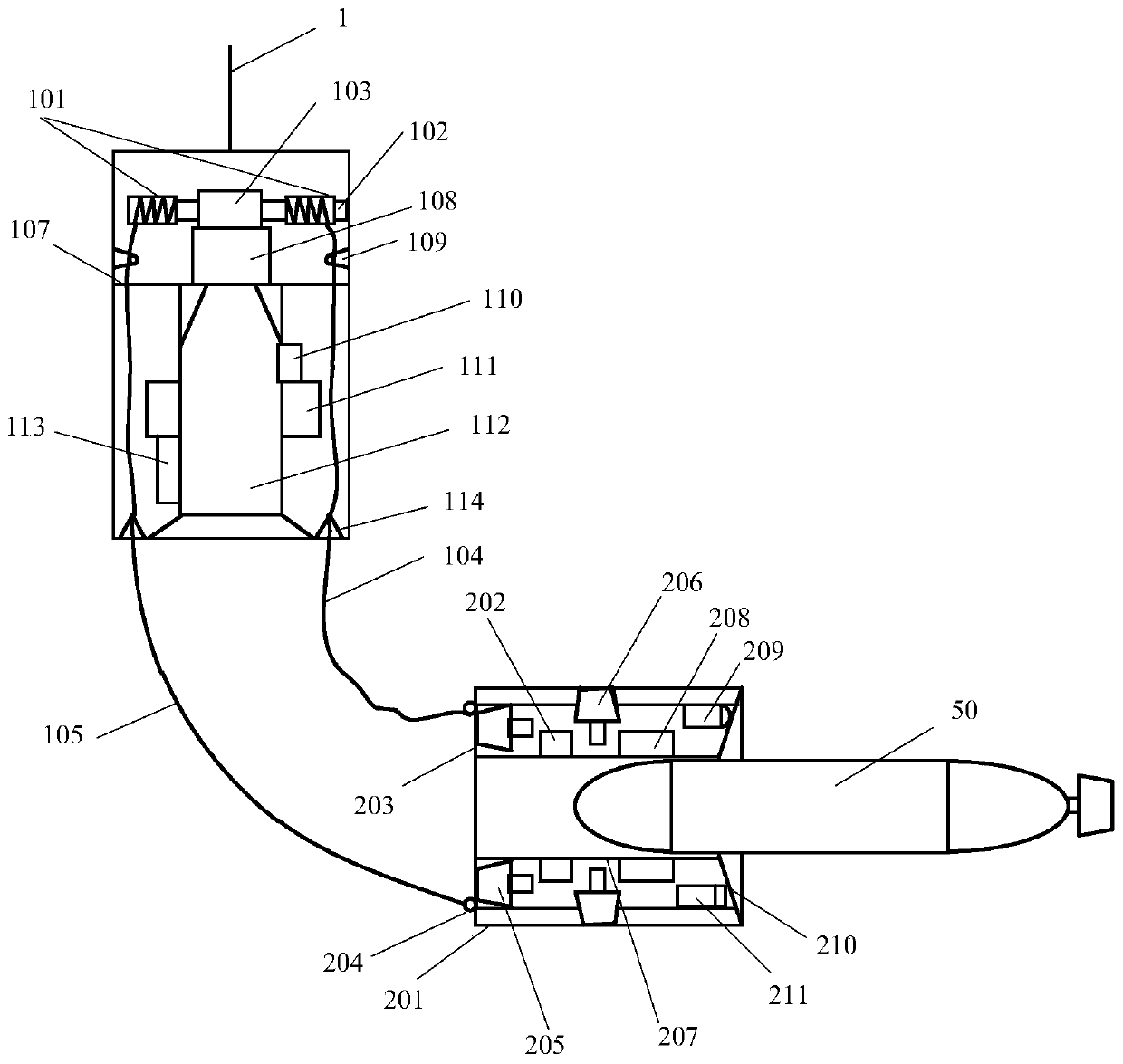
[0040] The connection cabin 10 is fixedly connected with the load-bearing cable 1 that drives it to move, and is used to capture the underwater retraction of ROV20 (Remotely Operated Vehicle, cable-controlled submersible) and the charging endurance and data communication of the AUV for underwater ice detection;
[0041] Catch the ROV20, connect with the connection cabin 10 to form a cylindrical overall structure that can move in the ice hole 2 with limited aperture, and can break away from the connection cabin 10 for water sample or sediment collection when the water 3 is submerged. It can actively capture and connect with the un...
Embodiment 2
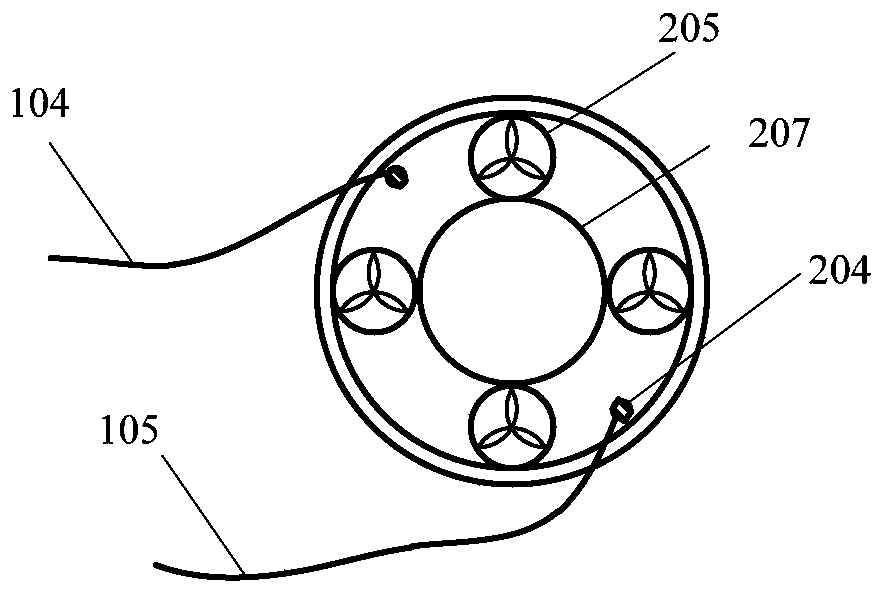
[0063] see Figure 6 The difference between the present embodiment and the first embodiment is that the capture ROV20 in this embodiment is not equipped with a lateral thruster 206, so that the maneuverability of the capture ROV20 will be slightly worse, but the advantage is that the axial length of the capture ROV20 can be reduced. And at the position where the ROV outer cylinder 201 is close to the backward thruster 205, large circular holes 216 are respectively dug, the purpose is to make the external water flow better communicate with the backward thruster and improve the propulsion efficiency.
[0064] The rest of the structures and functions are the same as those in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More