

Indoor positioning algorithm capable of combining inertial navigation with terrestrial magnetism on the basis of credibility
An indoor positioning and reliability technology, which is applied to navigation calculation tools, navigation and navigation through speed/acceleration measurement, and can solve the problems of fluctuations in geomagnetic information collection, large differences in geomagnetic information, and time-consuming and labor-intensive geomagnetic fingerprint database.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0110] An indoor positioning algorithm based on reliability-based inertial navigation and geomagnetic fusion, comprising the following steps:
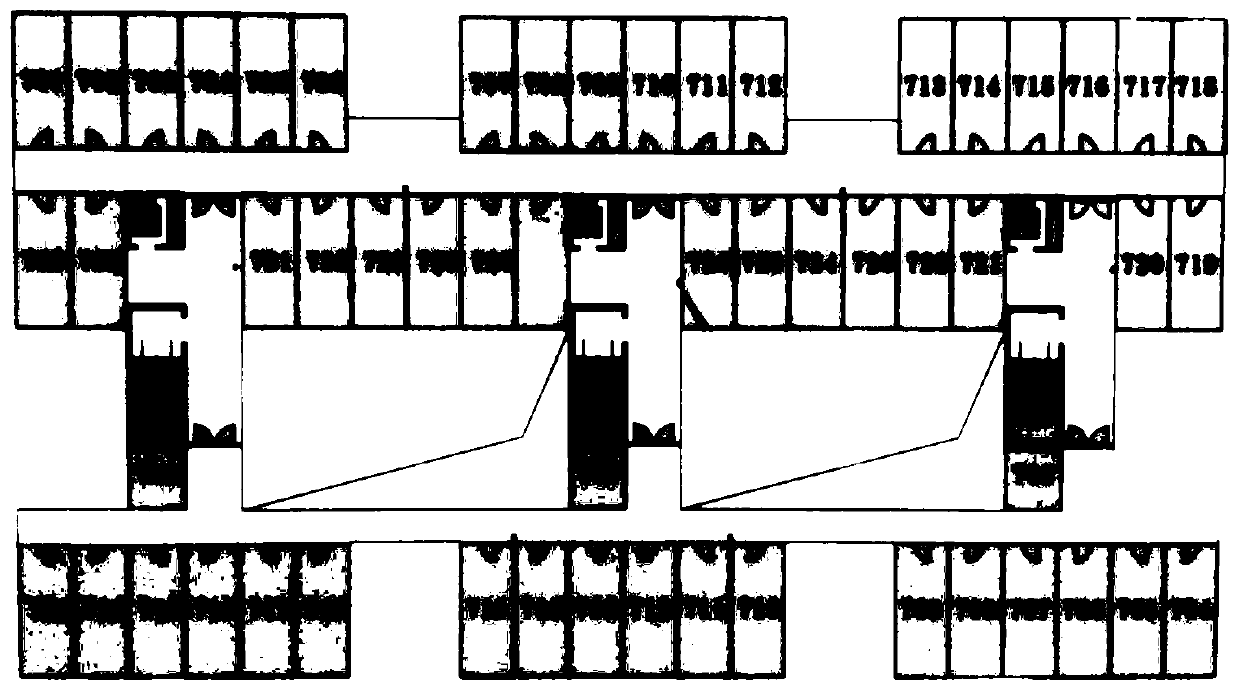
[0111] In the positioning initialization stage, it is necessary to complete the selection of the area and the construction of the fingerprint library in this area. The test environment is a student apartment with a width of about 25m and a length of about 60m. Complete the work of data collection; the specific steps are as follows:
[0112] Step 1): Set the origin coordinates in the positioning area, set the lower right corner of the test area as the origin (0,0), divide the coordinate system in this area, the positive direction of the x-axis of the coordinate system is the true north direction, and the coordinate system The reverse direction of the x-axis of the coordinate system is due south, the positive direction of the y-axis of the coordinate system is due west, and the reverse direction of the y-axis of the coordinate system is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More