

Sliding mode control method for vehicle suspension
A technology of vehicle suspension and control method, which is applied in the field of vehicle control and can solve problems such as unsatisfactory damping effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0083] The sliding mode control method of the vehicle suspension described in this embodiment includes the following steps:
[0084] Step 1. Create a semi-car suspension model:
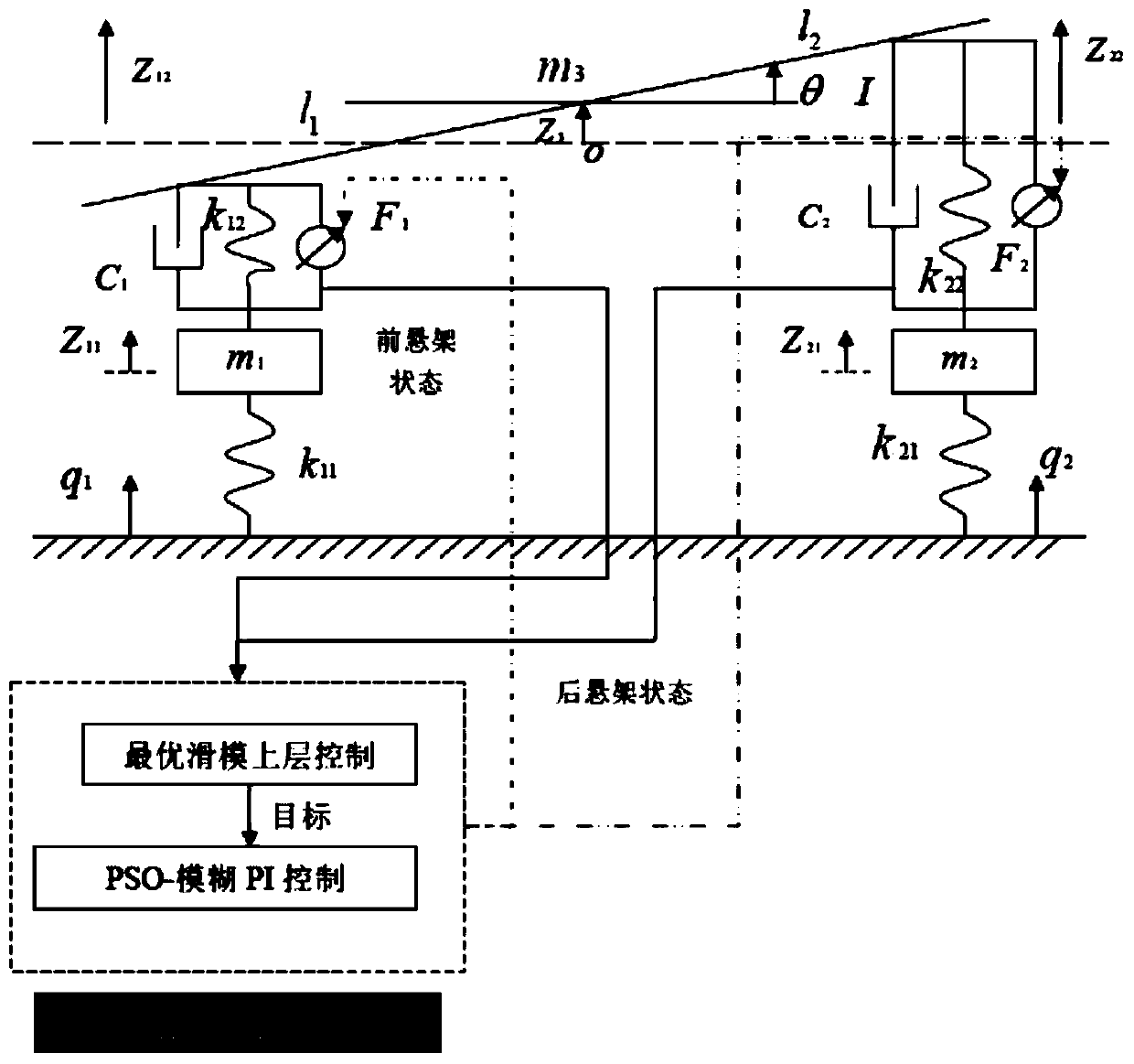
[0085] The present invention adopts half car 4 degrees of freedom vehicle model, see figure 1 , for dynamic analysis of the vehicle model:
[0086]
[0087]
[0088]
[0089]
[0090]
[0091] In the formula: z 21 ,z 22 are the vertical displacements of the connection points between the front and rear suspensions and the body, respectively; l 1 , l 2 are the distances from the body center of mass O to the front and rear axles; θ is the pitch angle; z 3 is the vertical displacement of the body center of mass; m 1 、m 2 、m 3 are the front and rear unsprung mass and sprung mass respectively; I is the pitch moment of inertia of the body around the center of mass; z 11 ,z 12 are the vertical displacements of the front and rear unsprung masses, respectively; c 1 、c 2 where is the e...
specific Embodiment approach 2
[0147] The sliding mode control method of the vehicle suspension described in this embodiment, on the basis of the specific embodiment 1, also includes the process of establishing a dynamic layered model to realize layered control, and the specific process is as follows:
[0148] Step 3. Establish a dynamic layered model:
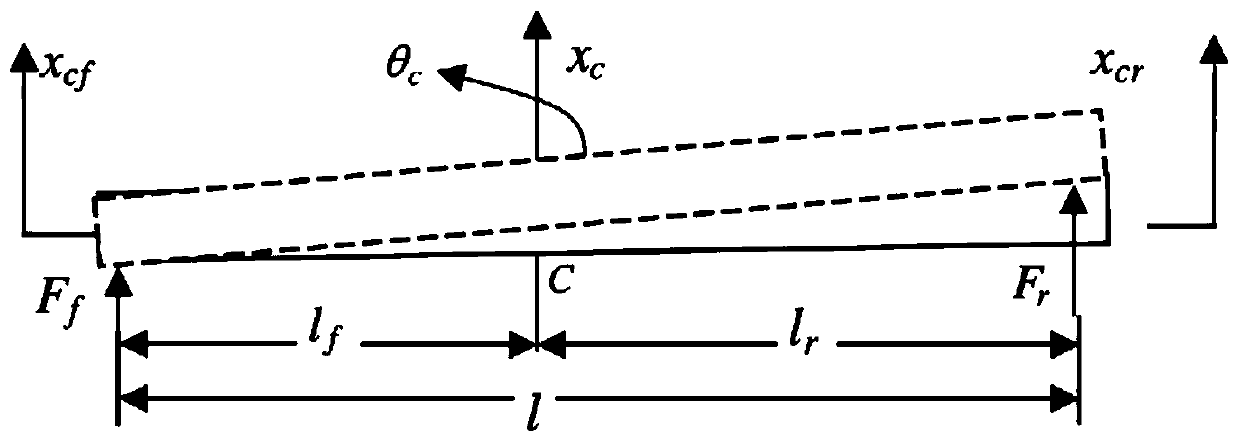
[0149] The following is the analysis of the body force, figure 1 The bottom forces (including spring force, damping force, and semi-active actuator output force) of the front suspension system and rear suspension system in the formula are regarded as a concentrated force, that is, F f and F r ,Such as image 3 shown. According to the motion theorem of the center of mass and the theorem of the moment of momentum relative to the center of mass:
[0150]
[0151]
[0152] In the formula, m c is the sprung mass in kg; I c is the moment of inertia of the sprung mass, in kg m 2 ; is the displacement acceleration at the center of mass of the suspens...
Embodiment
[0216] Carry out control according to the mode of specific embodiment 1 and specific embodiment 2.
[0217] In the specific implementation mode 2, a semi-vehicle suspension can be decoupled into a combination of two 1 / 4 suspensions through the analysis of four parts. The specific design process of the optimal sliding mode layered control strategy is as follows:
[0218] (1) In the present invention, the suspension mass center acceleration obtained by optimal sliding mode control and pitch acceleration of the center of mass Multiplied by 0.6, respectively, as the target of the underlying control.
[0219] (2) Obtained from formulas (20), (21), (24) and (25) respectively and The estimated value of is obtained from formula (30), (31) and , and then get the estimated value of the decomposed front and rear suspension sprung mass acceleration:
[0220]
[0221]
[0222] (3) put and As a known value, establish Figure 5 The expression of the space state equatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More