

Efficient stacking machine based on double-gripper truss robot
A truss robot, double gripper technology, applied in the stacking of objects, conveyors, conveyor objects, etc., can solve the problems of harsh electrical control requirements, increased structural strength requirements, high comprehensive cost, etc., and achieves easy maintenance and maintenance. The effect of improving work efficiency and improving maintenance efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
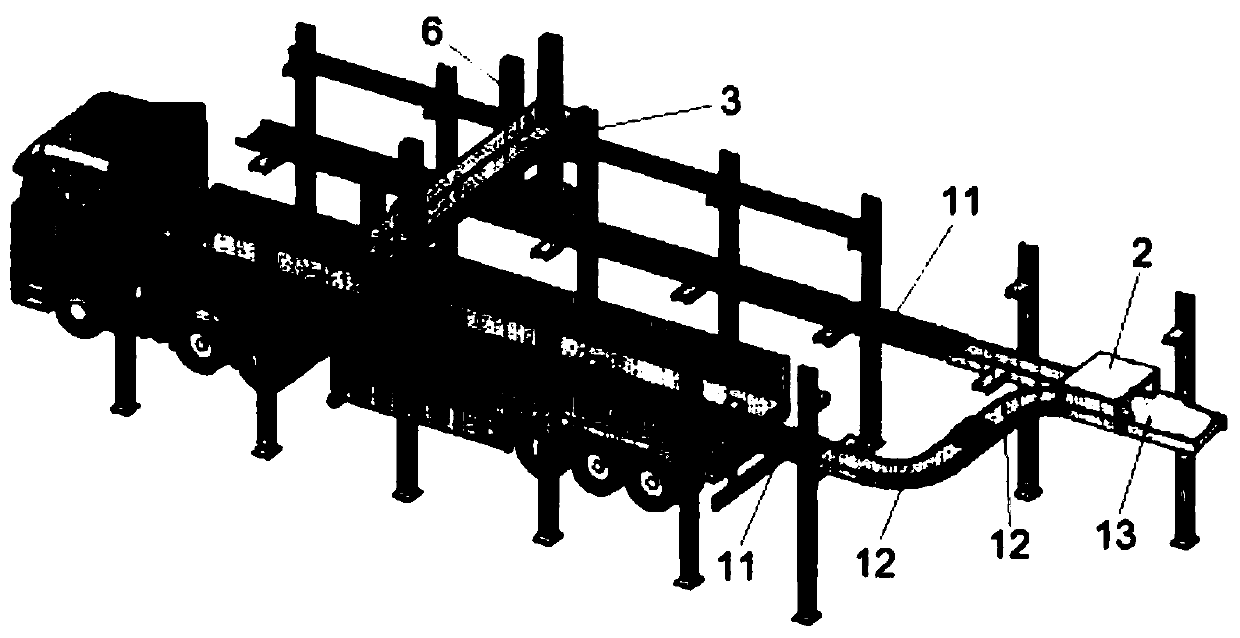
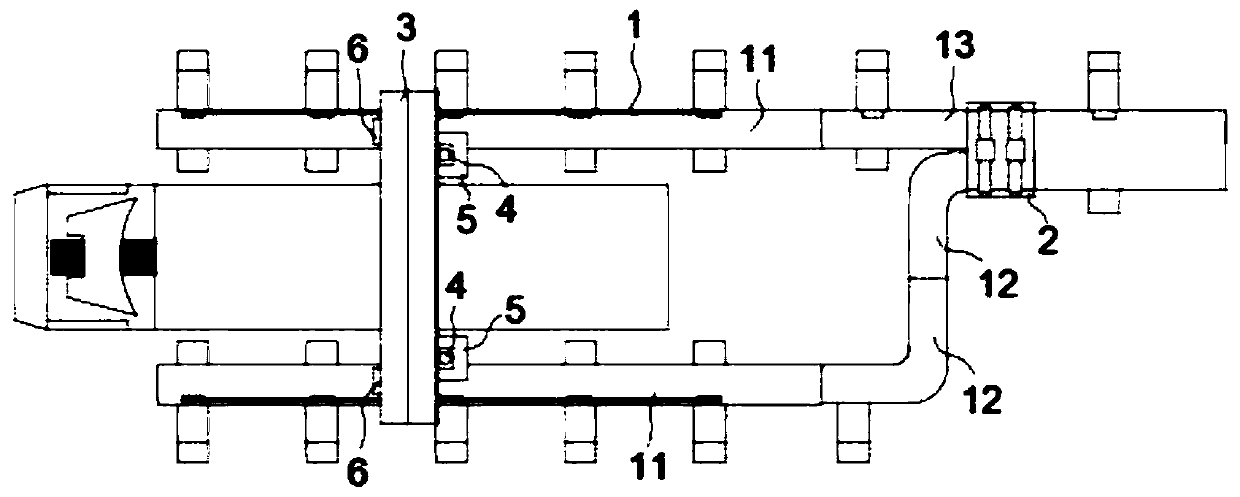
[0056] A high-efficiency palletizer based on a double-handle truss robot, characterized in that it mainly includes a truss handling system, a material delivery system, a control system, and a safety protection system;
[0057] Such as figure 1 and 2 As shown, the material conveying system is composed of five conveying lines 1, which are divided into two roller conveying lines 11, two right-angle turning conveying lines 12, and one straight conveying line 13; two roller conveying lines 11 are arranged in parallel on the truck On the left and right sides, the rear end of the first roller conveying line 11 is connected with the straight conveying line 13, and the material separation table 2 is arranged on the straight conveying line 13, and the rear end of the second roller conveying line 11 is at right angles to the first The turning conveying line 12 is connected, and the second right-angle turning conveying line 12 is spliced with the first right-angle turning conveying lin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More