

Monocular visual mileometer positioning method
A positioning method and monocular vision technology, applied in the field of computer vision, can solve problems such as insufficient robustness and unreasonable positioning strategies, and achieve the effects of high success rate, high positioning accuracy, and high robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
[0017] Taking the UAV public dataset EUROC as an example, its collected image resolution is 752*480, and the image sequence has illumination transformation and motion blur caused by the rapid movement of the UAV, so it is challenging.
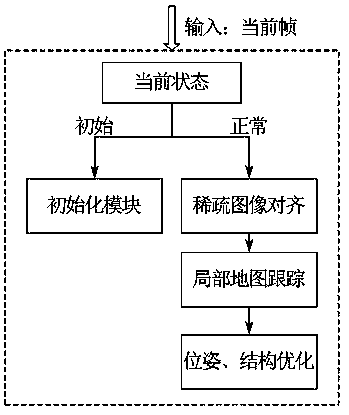
[0018] The present invention provides a monocular visual odometer positioning method that combines feature matching and semi-direct method, such as figure 1 As shown, including the following specific processes:
[0019] Step 1), read the current frame input image.
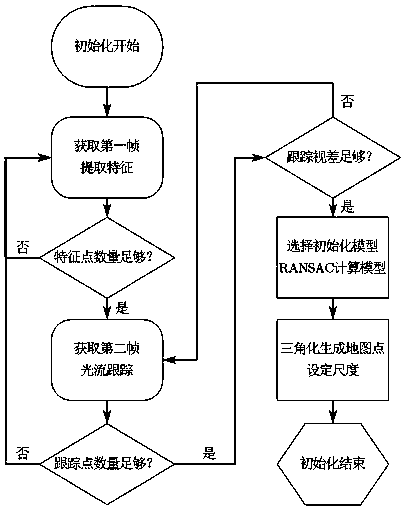
[0020] Step 2), read the current state of the current frame image, if it is the initial state, then enter the initialization module. If the current frame image is in a normal state, directly enter the sparse image alignment step. Such as figure 2 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More