Unmanned aerial vehicle avoidance algorithm based on improved ssd target detection network
A target detection and unmanned aerial vehicle technology, applied in the direction of computing, computer components, instruments, etc., can solve the problems of blind spots, avoiding algorithm machinery, and high environmental requirements, etc., to achieve volume reduction, low equipment cost, accuracy and The effect of improving the effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0057] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
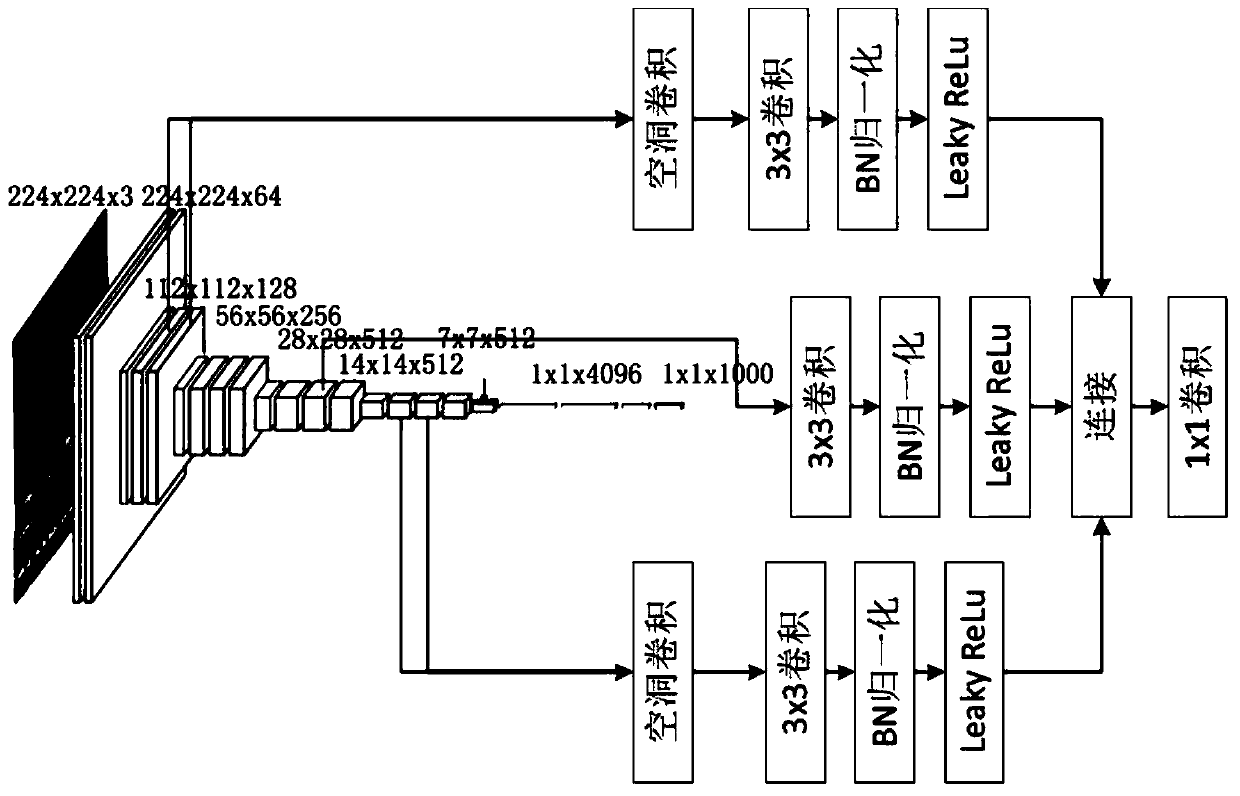
[0058] see Figure 1-3 , the present invention provides a technical solution: a UAV evasion algorithm based on an improved ssd target detection network: comprising:
[0059] (1): Create a training set and a test set, and set the test set corresponding to the target detection model and binocular ranging:
[0060] Obstacle-related data sets are extracted from the VOC, COCO, and SOGOU data sets as target detection data sets, of which 5721 pictures are used as training sets, and 500 pictures are taken as test sets;
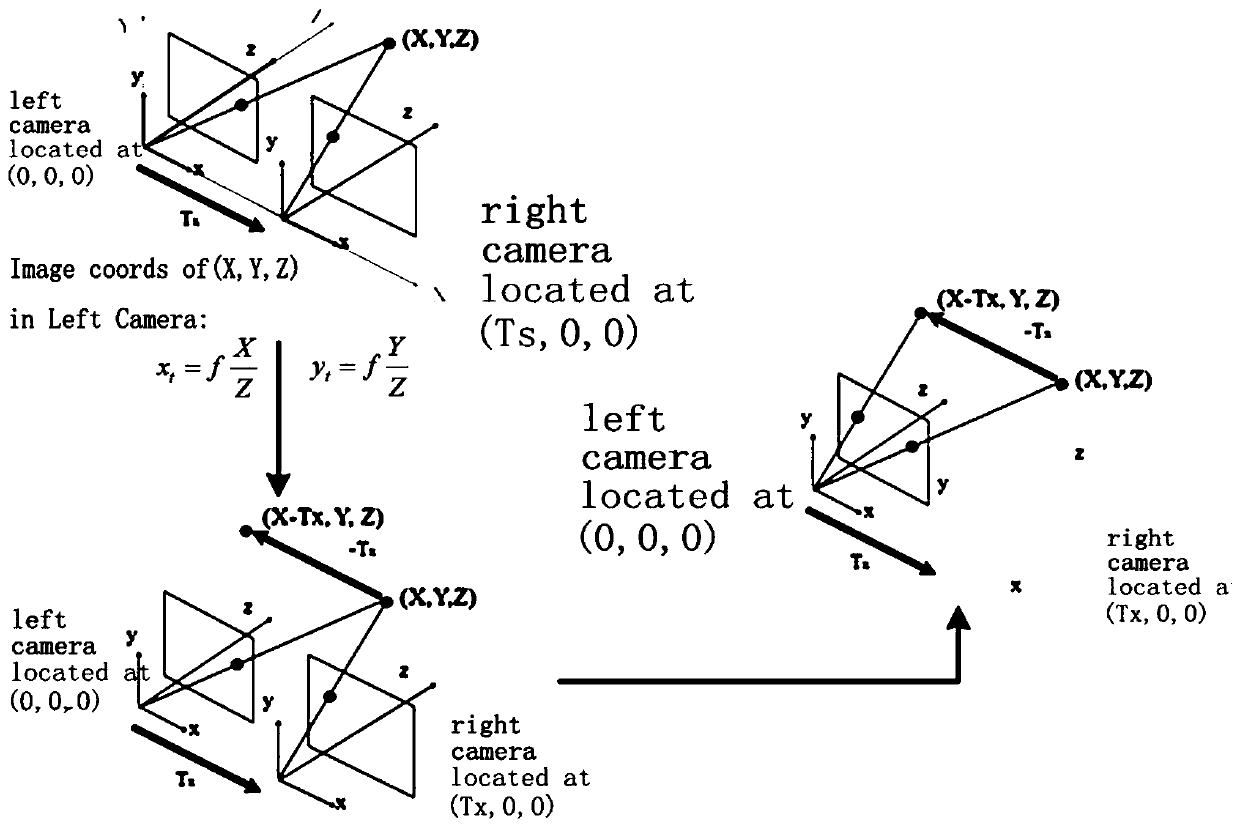
[0061] Fix the relative distance of the two cameras from the real scene, take 200 pairs of obstacle pictures, and measure the vector d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com