

A Position Tracking Control Method of Asynchronous Motor Based on Finite Time Dynamic Surface
An asynchronous motor, limited time technology, applied in the direction of motor generator control, electronically commutated motor control, control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
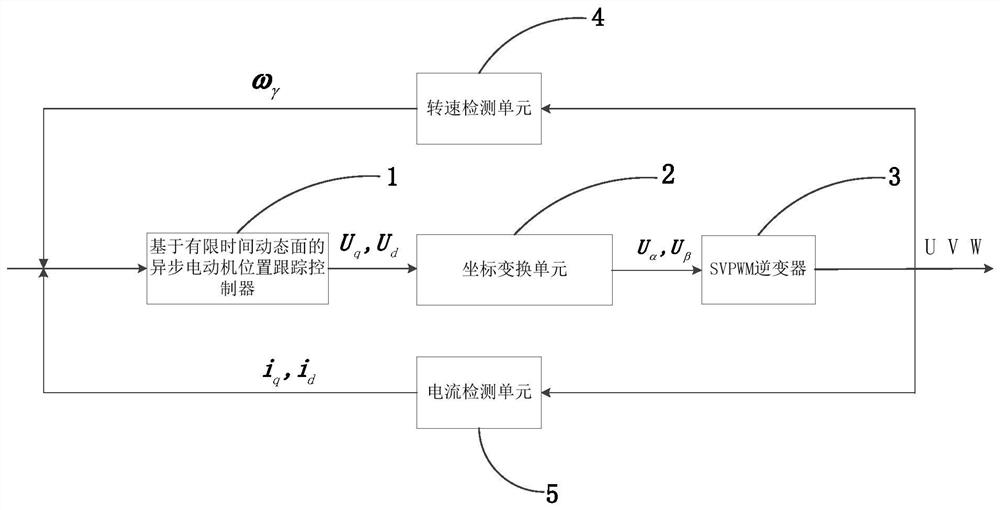
[0144] The basic idea of the present invention is: obtain the mathematical model of the asynchronous motor with iron loss from the reference and simplify it to a certain extent, use the self-adaptive backstepping method to transform the complex high-order system into a plurality of simple low-order subsystems, through Introduce virtual control variables to construct the controller, and under the premise of considering the adverse effects of input saturation, introduce the dynamic surface technology into the selection of each low-order subsystem and the overall Lyapunov function and the construction of the intermediate virtual control signal. The control law is obtained by recursion, and the influence of unknown parameters is reduced by constructing the corresponding adaptive law; the introduction of dynamic surface technology effectively solves the problem of "computational explosion" in the traditional backstepping method, and the introduction of finite time technology , so ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More