

Multi-information fusion human exoskeleton robot control protection system
An exoskeleton robot, multi-information fusion technology, applied in the field of robotics, can solve problems such as rehabilitation of patients with backward rehabilitation equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The technical solutions provided by the present invention will be described in detail below in conjunction with specific examples. It should be understood that the following specific embodiments are only used to illustrate the present invention and are not intended to limit the scope of the present invention.
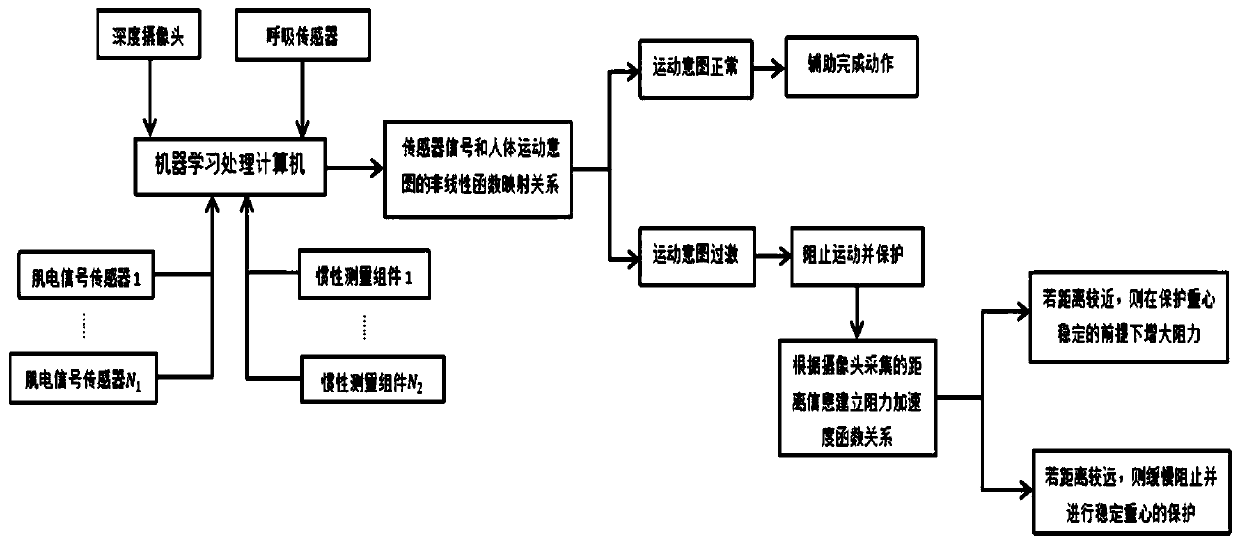
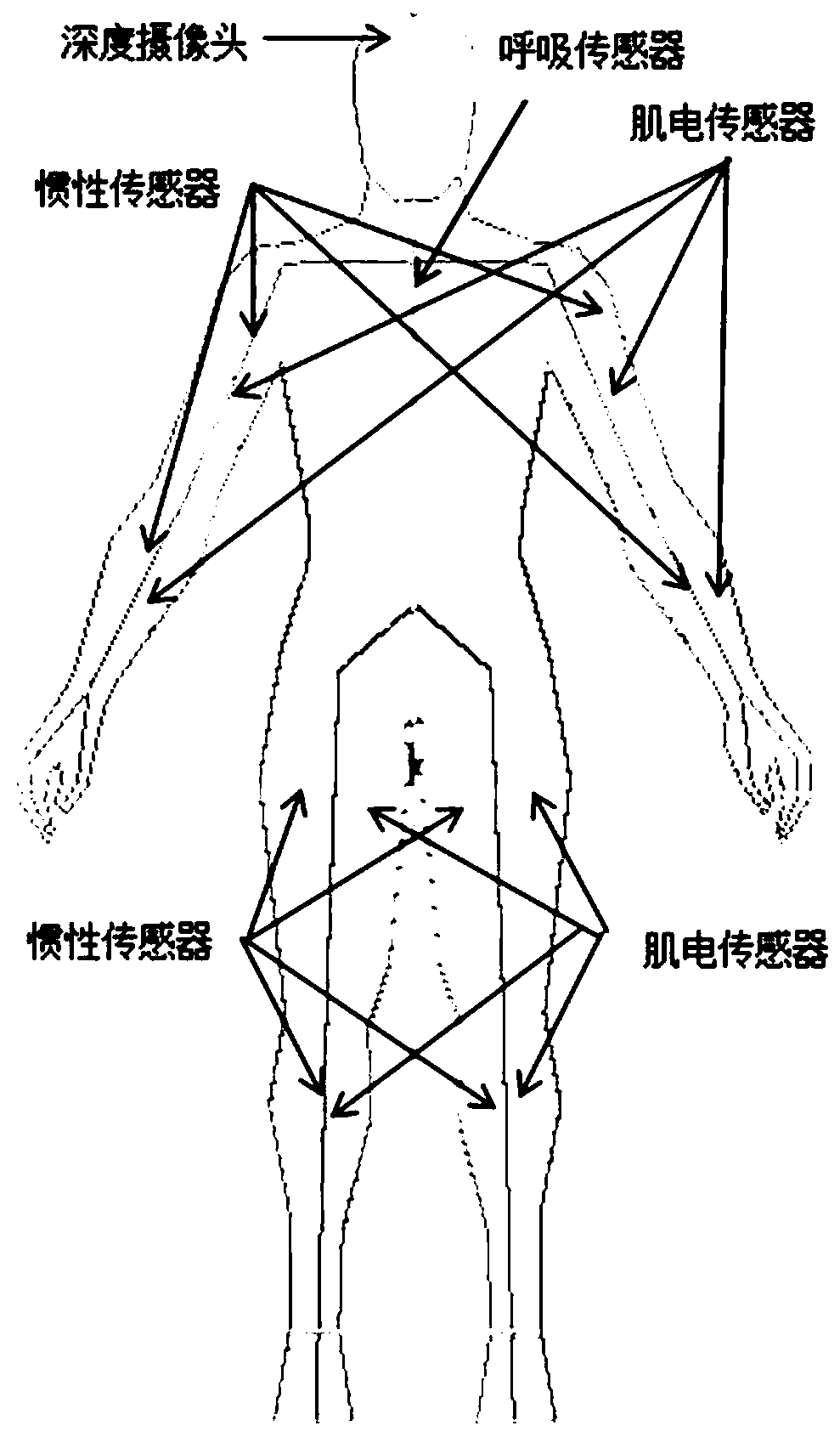
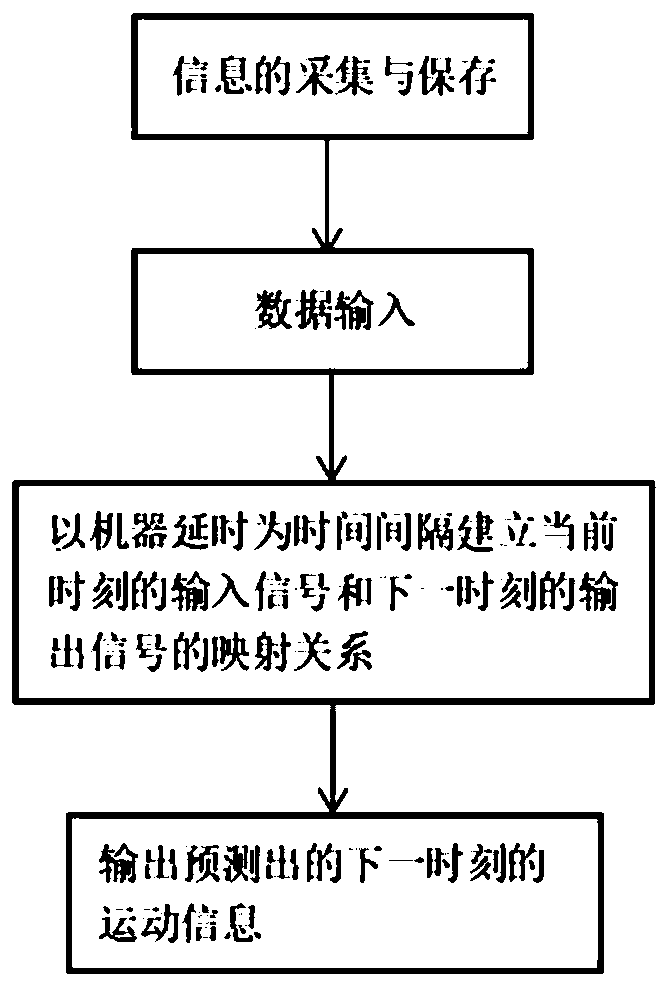
[0057] The invention combines inertial components, human physiological signal sensors, computer vision and other methods to identify human movement intentions, and then controls the movement of the exoskeleton robot. The inertial measurement components, physiological signal sensors, and depth cameras are installed on the corresponding parts of the human body. Based on the different motion state signals of the human body, the output model of the exoskeleton robot system is constructed through the analysis of the human kinematics mechanism and machine learning algorithms. According to the bidirectionality of the exoskeleton robot system, the operator's decision-maki...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More