

Rapid spherical coordinate laser radar simulation method
A technology of lidar and simulation method, applied in the field of simulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0118] It should be noted that the embodiments of the present invention and the features in the embodiments can be combined with each other if there is no conflict.
[0119] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings:
[0120] The present invention requires the CPU and GPU to perform cooperative operations.
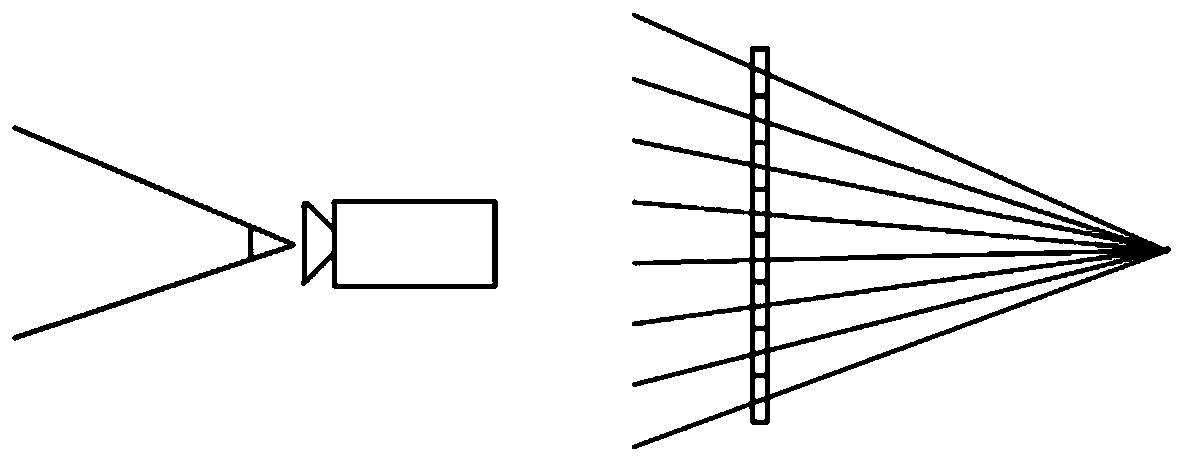
[0121] In the present invention, the rectangular coordinate system is defined as a left-handed coordinate system. That is, the front direction of the object is the Z axis, the right side is the X axis, and the upper side is the Y axis.
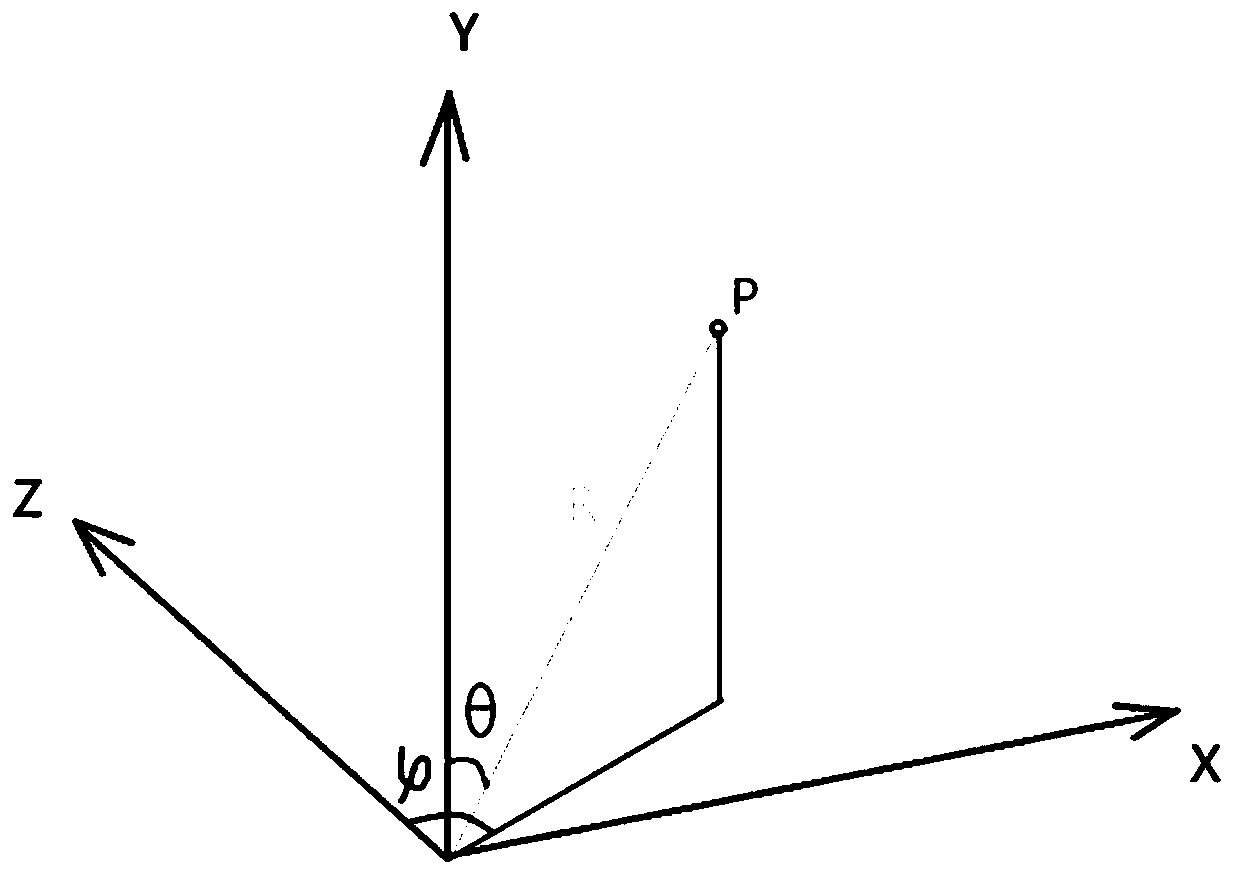
[0122] Define the spherical coordinate system as:
[0123] ψ is the angle between the projection of a point P on the XZ plane and the Z axis in space.
[0124] θ is the angle between a point P and the Y axis in space.
[0125] R is the distance of a point P from the origin in space.
[0126] Defined as figure 2 Shown.
[0127] The CPU needs to perform some in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More