Weighted centroid positioning algorithm based on RSSI ranging
A technology of weighted centroid and positioning algorithm, which is applied to services based on location information, services based on specific environments, and positioning. It can solve problems such as ranging errors and inaccurate positioning coordinates, and achieve the effect of improving accuracy and positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] Embodiments of the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and therefore are only examples, rather than limiting the protection scope of the present invention.
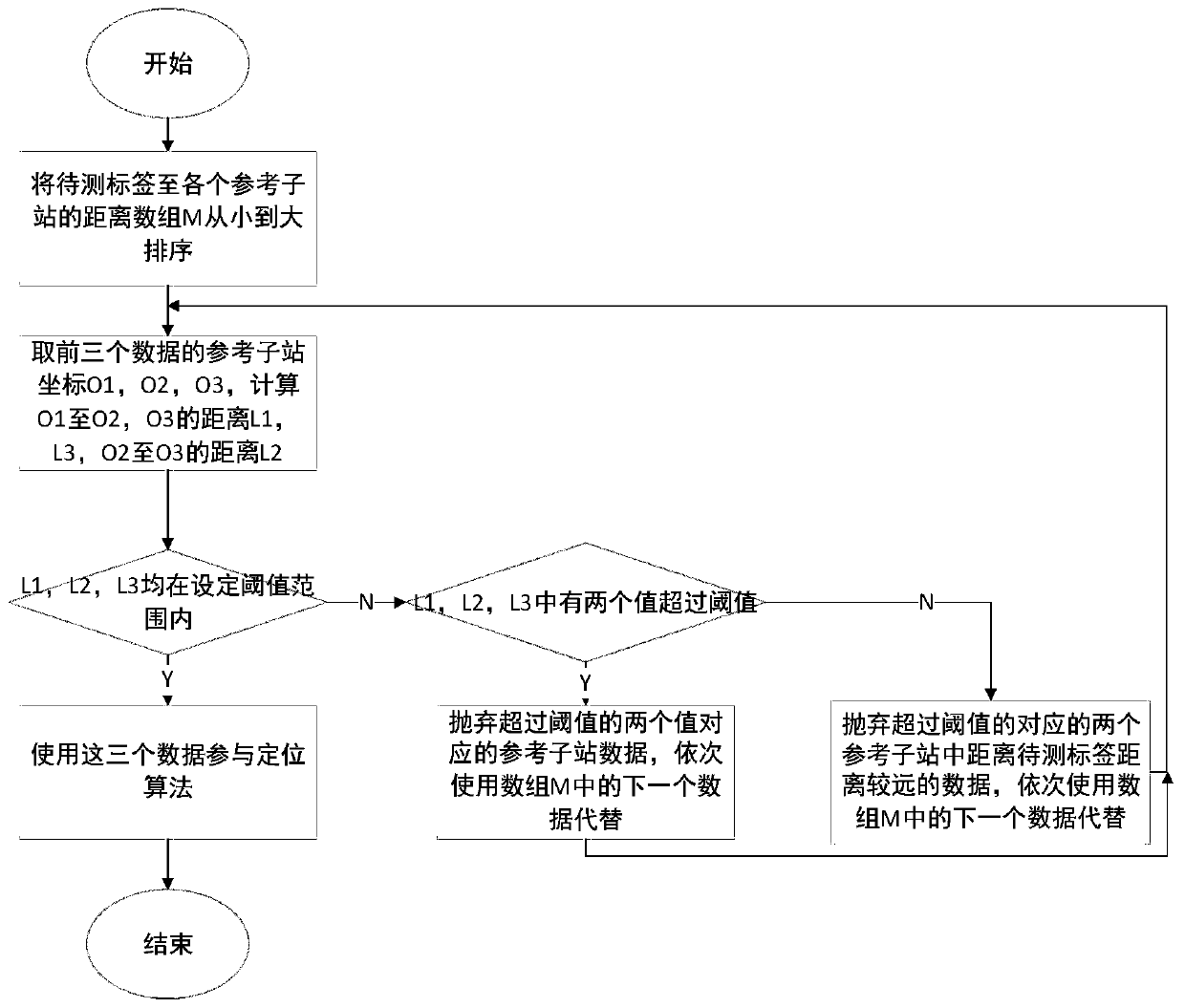
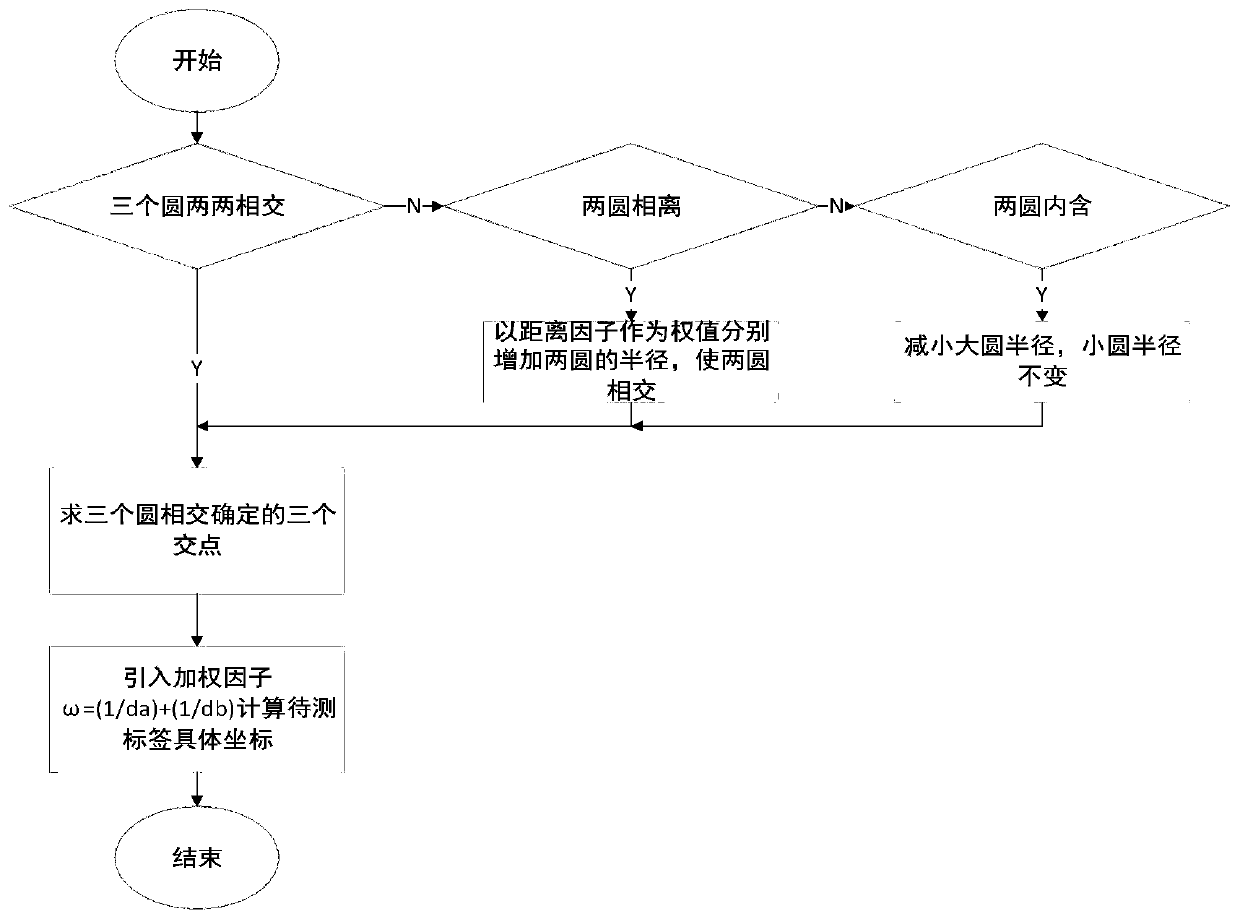
[0028] A weighted centroid positioning algorithm based on RSSI ranging disclosed by the present invention is implemented based on a positioning system. The positioning system includes a server, a base station, a plurality of reference sub-stations and tags to be tested. Calculate the distance between the stations and send it to the server. The server calculates the coordinate value of the label to be tested according to the weighted centroid positioning algorithm combined with the coordinate value of the reference sub-station, such as Figure 1~2 As shown, the specific steps are:
[0029] a. The distance value d b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More