

Cloud-computing-based automatic supplying type intelligent road cleaning method and system
A technology of intelligent road and cleaning method, applied in road cleaning, motor vehicles, cleaning methods, etc., can solve problems such as the requirements of high operating load capacity of information security hidden servers
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] refer to Figure 1-3 , Figure 5-10 shown.
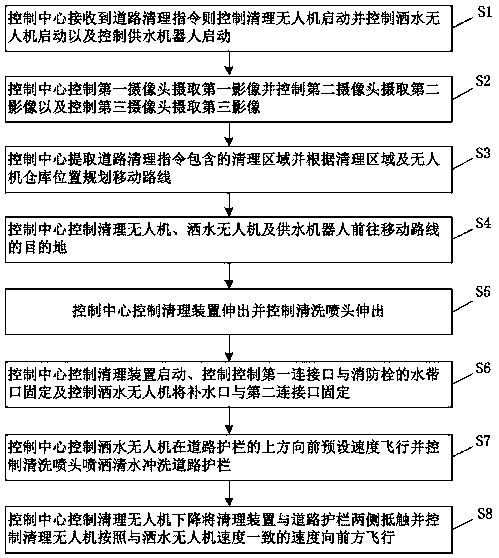
[0082] Specifically, this embodiment provides a cloud computing-based automatic replenishment intelligent road cleaning method, the method comprising the following steps:
[0083] S1. After the information receiving module 71 inside the control center 7 receives the road cleaning instruction sent by the external equipment of the urban environmental management department, the cleaning control module 72 inside the control center 7 controls the cleaning unmanned data stored in the unmanned aerial vehicle warehouse 10. Machine 11 is started, and the sprinkler control module 73 inside the control center 7 controls the sprinkler drone 12 stored in the drone warehouse 10 to start, and the water supply control module 74 inside the control center 7 controls the sprinkler drone 12 stored in the drone warehouse 10. The water supply robot 20 at the inner position starts;
[0084]S2. After the cleaning UAV 11, the watering UAV 12 and t...
Embodiment 2
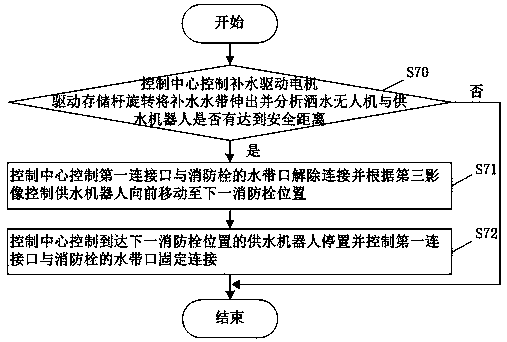
[0102] refer to Figure 4 , Figure 6-7 shown.
[0103] Specifically, this embodiment is basically the same as Embodiment 1, except that in this embodiment, after S8, the method further includes the following steps:
[0104] S80, the control center 7 controls the antistatic nozzle 41 arranged at the rear position outside the cleaning drone 11 to rotate to face the position of the road guardrail after cleaning by the cleaning drone 11 according to the first image, and controls the antistatic nozzle 41 according to the first image. The electrostatic spray head 41 sprays the antistatic spray to the surface position of the road guardrail that the cleaning drone 11 has cleaned;
[0105] S81. The control center 7 controls the antistatic spray head 41 and the cleaning drone 11 to maintain a synchronous operation state according to the first image, the second image and the third image.
[0106] Specifically, when the cleaning control module 72 controls the cleaning UAV 11 according...
Embodiment 3
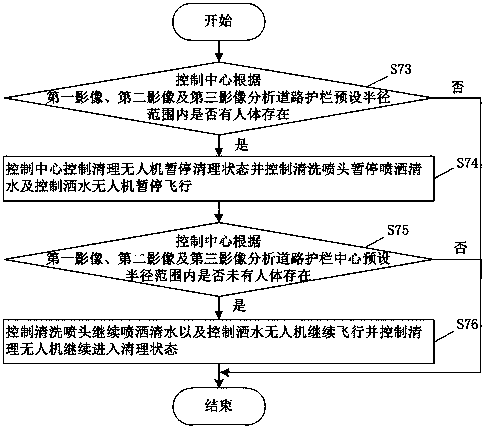
[0108] refer to Figure 5-6 , Figure 11 shown.
[0109] Specifically, this embodiment is basically the same as Embodiment 1, the difference is that in this embodiment, the method further includes the following steps:
[0110] S21. When cleaning the UAV 11 to clean the road guardrail, the information analysis module 85 analyzes in real time whether the road guardrail is toppled according to the first image, the second image and the third image;
[0111] S22, if the information analysis module 85 analyzes that the road guardrail has a dumping phenomenon, the positioning control module 90 controls the positioning device 63 arranged on the internal position of the cleaning drone 11 to start positioning to obtain and add fixed positioning data in real time, and controls the positioning at the positioning control module 90 After the device 63 acquires the reinforced and fixed data, the control center 7 internally controls the protective device 5 that is arranged at a position con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More