

Integrated robot joint structure
A robot joint and integrated technology, which is applied in the direction of manipulators, electromechanical devices, mechanical equipment, etc., can solve the problems of complex debugging, high installation precision requirements, and large structural noise, and achieve the effects of reducing noise, reducing precision requirements, and reducing vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
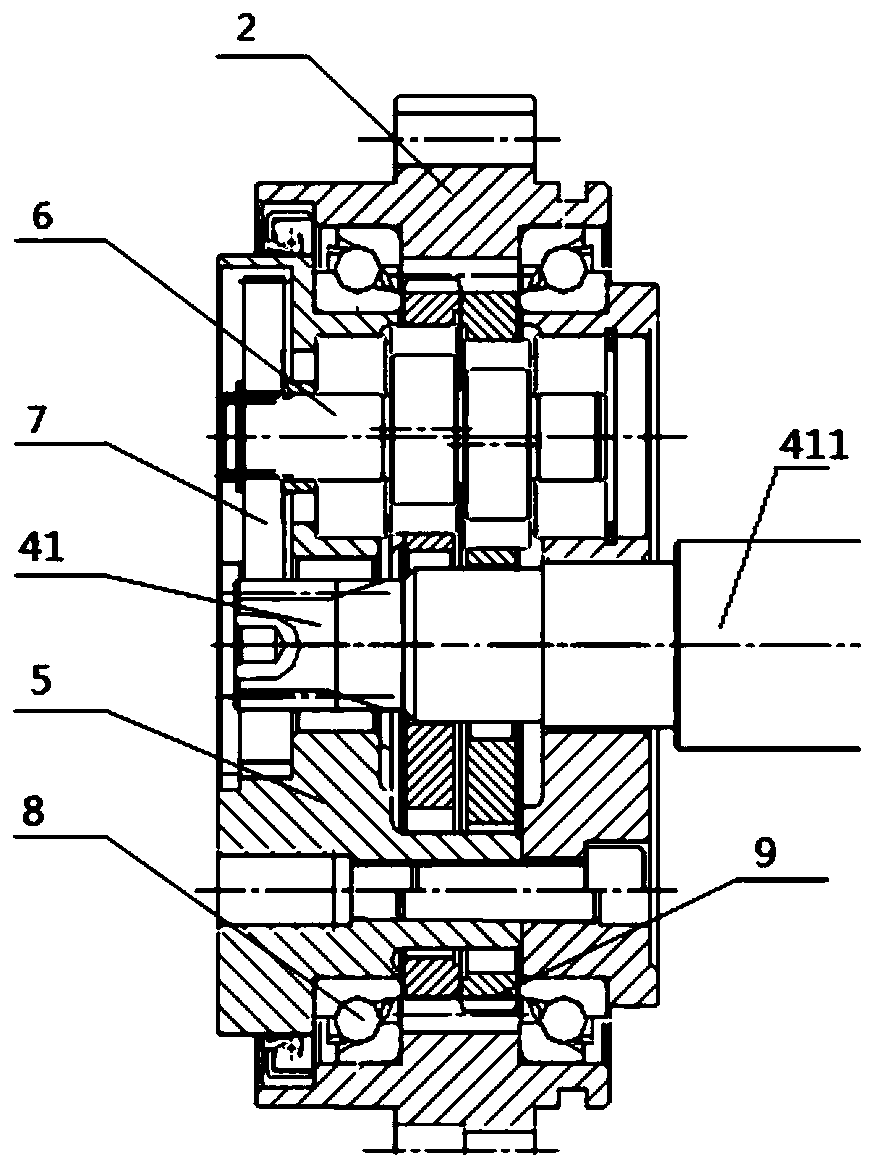
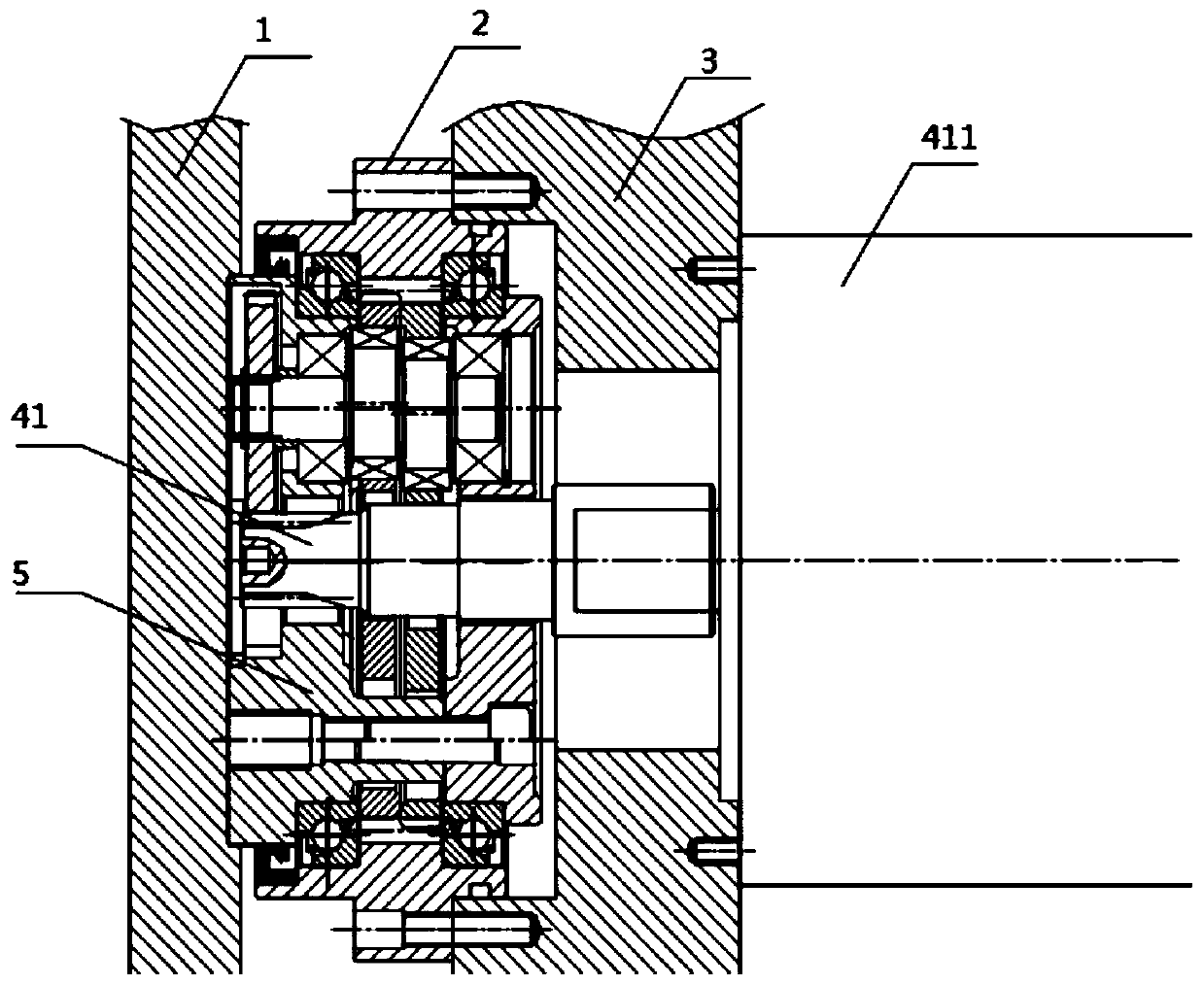
[0037] like figure 1 , figure 2 and image 3Shown: an integrated robot joint mechanism, characterized in that it includes the output body 1, the pin gear housing 2 of the RV reducer, the fixed end body 3, the integrated motor 4, the output frame 5 of the RV reducer, and the eccentric Shaft 6, planetary gear 7, angular contact ball bearing 8, cycloidal wheel 9; the integrated motor 4 includes the main body of the motor 411 and the input shaft 41 connected with the motor 411, the integrated motor 4 and the pin gear housing of the RV reducer 2 are combined into an integrated unit, the pin gear housing 2 of the RV reducer of the integrated unit is fixedly connected with the fixed end body 3, the output frame 5 of the RV reducer is connected with the output end body 1, and the eccentric shaft 6 includes a cam, concentric circles of the eccentric shaft, tapered roller bearings, and a needle roller cage. The cam of the eccentric shaft 6 is fitted with a needle roller cage bearing,...
Embodiment 2
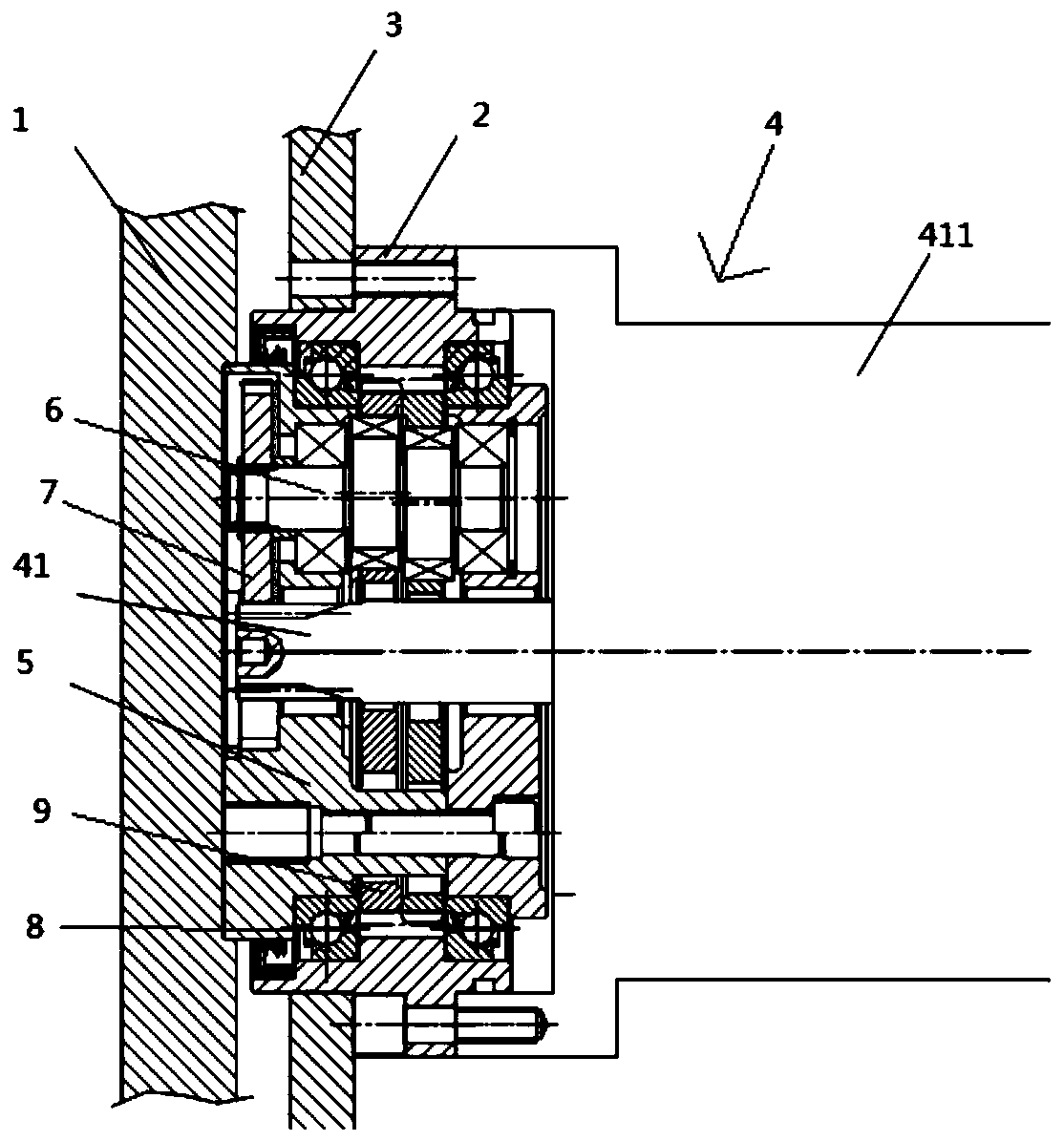
[0048] like figure 1 , figure 2 and Figure 4 Shown: an integrated robot joint mechanism, characterized in that it includes the output body 1, the pin gear housing 2 of the RV reducer, the fixed end body 3, the integrated motor 4, the output frame 5 of the RV reducer, and the eccentric Shaft 6, planetary gear 7, angular contact ball bearing 8, cycloidal wheel 9; the integrated motor 4 includes the main body of the motor 411 and the input shaft 41 connected with the motor 411, the integrated motor 4 and the pin gear housing of the RV reducer 2 are combined into an integrated unit, the pin gear housing 2 of the RV reducer of the integrated unit is fixedly connected with the fixed end body 3, the output frame 5 of the RV reducer is connected with the output end body 1, and the eccentric shaft 6 includes a cam, concentric circles of the eccentric shaft, tapered roller bearings, and a needle roller cage. The cam of the eccentric shaft 6 is fitted with a needle roller cage bearin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More