

Underwater robot multi-sensor fusion data processing method
A multi-sensor fusion, underwater robot technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of low precision, estimation errors of attitude, position and speed, and the inability to correct noise matrix, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
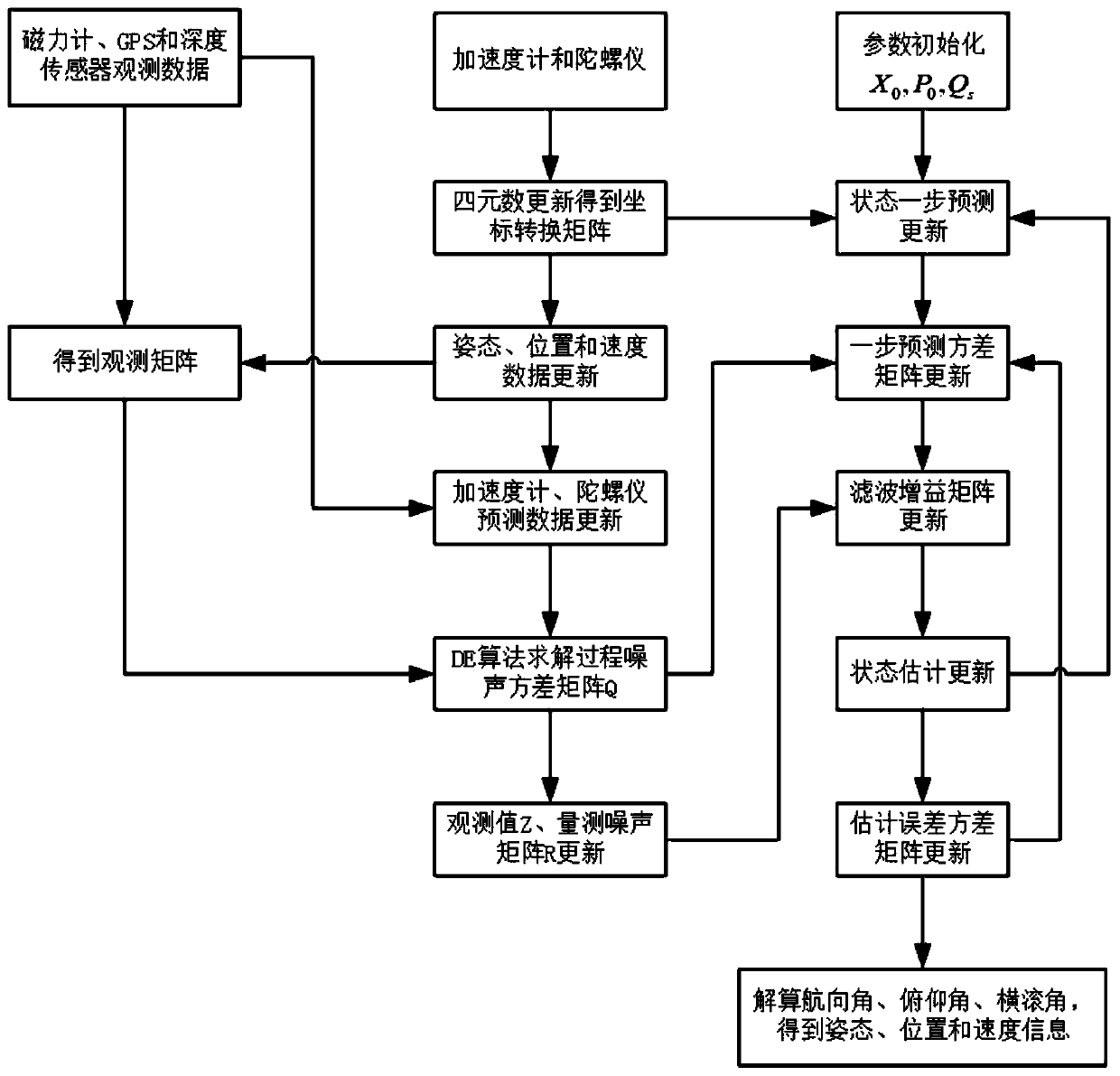
[0093] The invention provides a multi-sensor fusion data processing method of an underwater robot, which estimates attitude, position and speed information of the underwater robot based on multiple sensors of a gyroscope, an accelerometer, a magnetometer, a GPS and a depth sensor. By fusing all the sensor measurement data, the sensor measurement data with obvious errors can be better eliminated, so that the underwater robot is less susceptible to the failure of a single sensor, and is more suitable for nonlinear systems such as underwater robots. When constructing the state vector, the angle deviation and speed deviation are added to the state vector, and the influence of the angle deviation and speed deviation on the state update is considered to accurately estimate the attitude, position and speed information of the underwater robot. By assuming that the process noise is obtained from the filtering result and the observation result, the differential evolution algorithm is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More