

Visual-based man-machine safety system of industrial mechanical arm
A technology for industrial machinery and safety systems, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to monitor distances and blind spots in monitoring, and achieve the effects of improving safety, improving production efficiency, and reducing blind spots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach
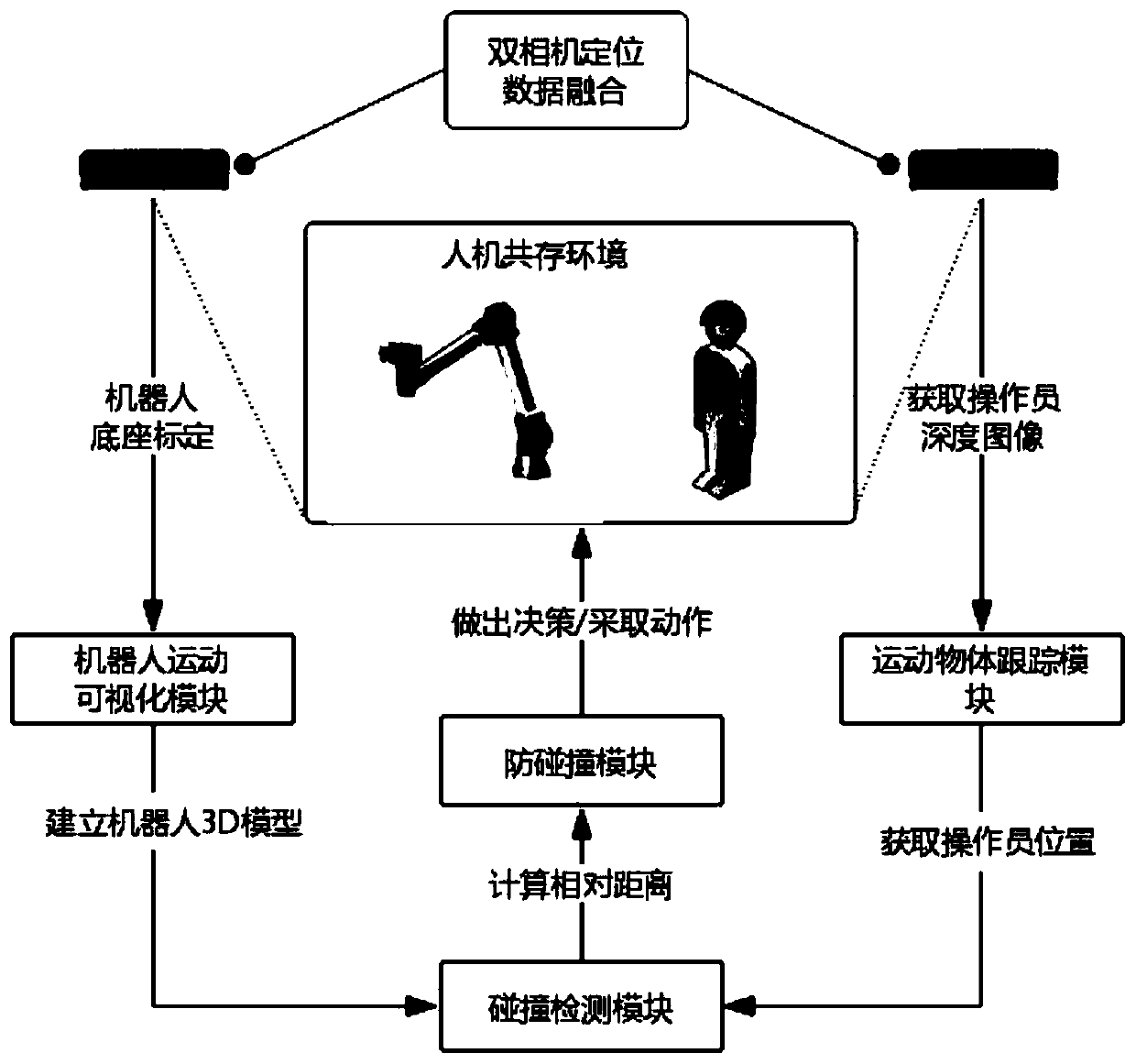
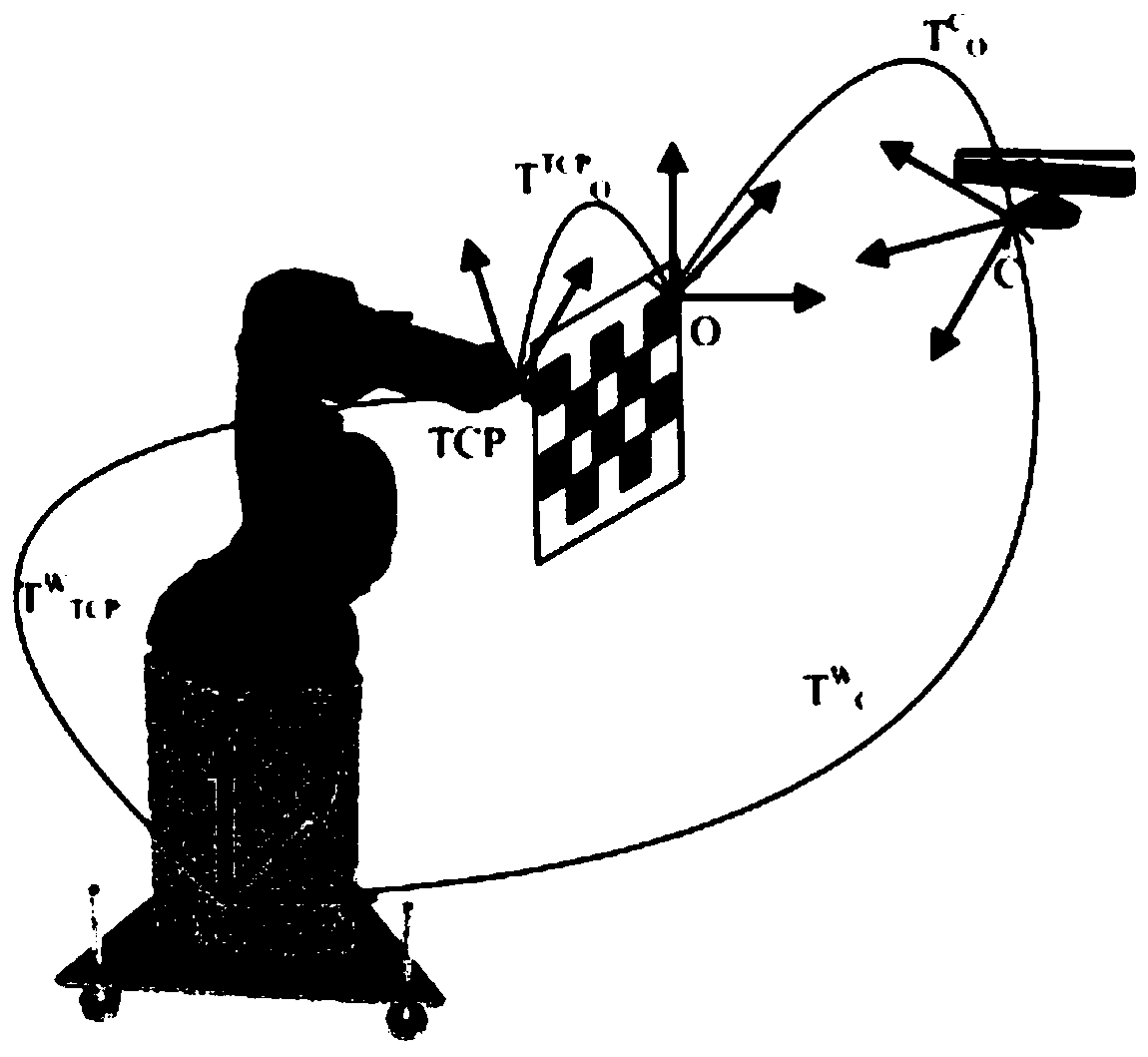
[0034] combine figure 1 , figure 2 , the specific implementation of the patent of the present invention is as follows:
[0035] The moving object tracking module uses the method of background difference to extract the foreground from the depth map based on the image of the manipulator workspace collected by the depth camera, and converts the depth map of the foreground into a point cloud image for clustering, and according to the number of point clouds and height information Extract the operator or other obstacles. The specific operation steps are as follows:
[0036] 1) First use the depth camera to capture the depth map of the robot's static environment (ie no people or any dynamic obstacles).
[0037] 2) Use the real-time urdf filter to process the depth map in step 1, and remove the robot itself from the depth map.
[0038] 3) Repeat steps 1 and 2 to obtain multiple depth maps, and then take the average value to reduce the influence of noise and use it as the environmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More