Ground-air cooperative visual navigation method and device based on improved graph optimization SLAM
A visual navigation and graph optimization technology, applied in the field of navigation, can solve problems such as system instability, low navigation efficiency, and algorithm complexity, and achieve the effects of solving channel blockage problems, speeding up the calculation speed, and reducing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention is described in detail below in conjunction with accompanying drawing and specific embodiment:
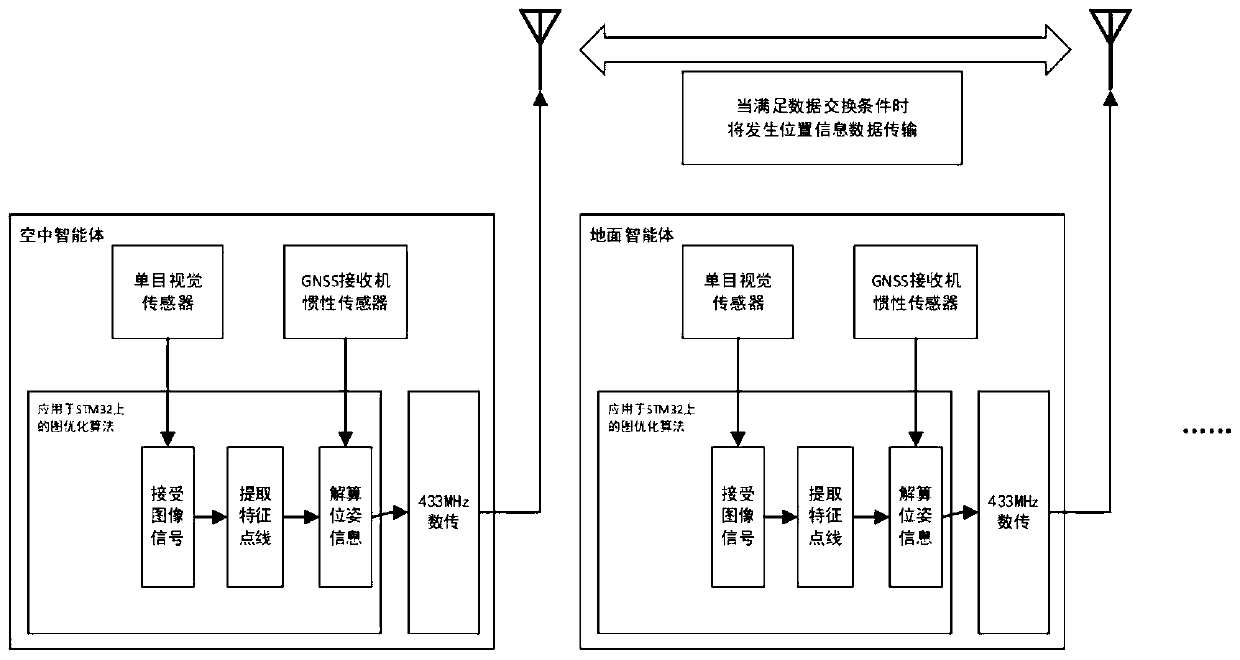
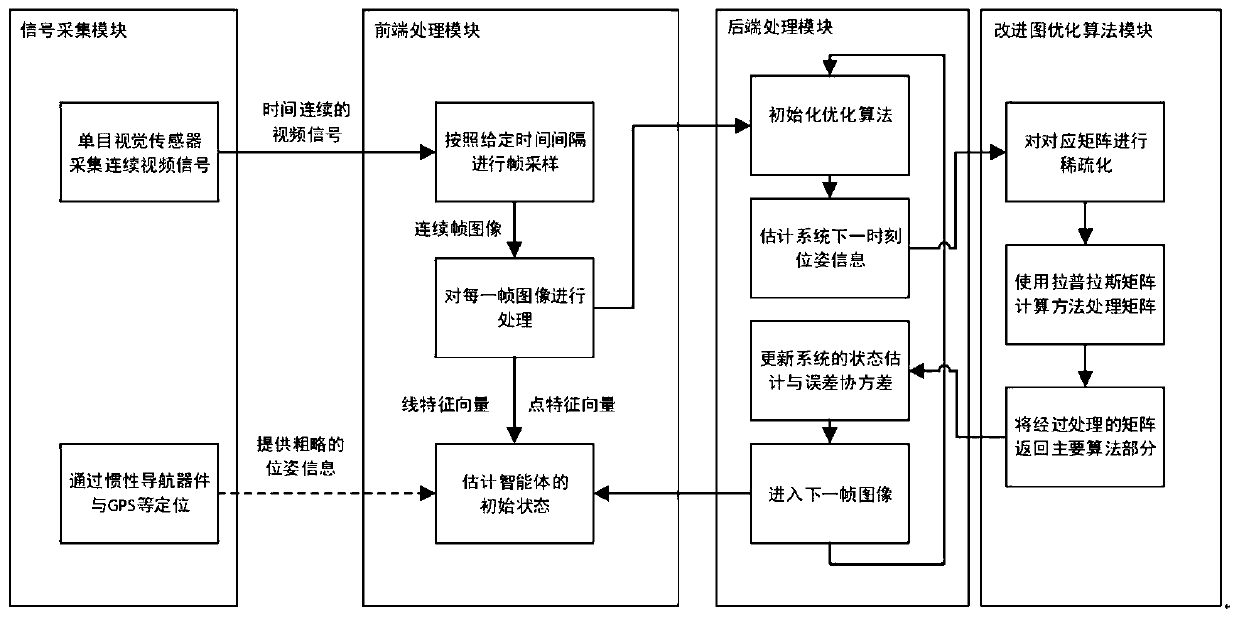
[0029] Such as image 3 As shown, a ground-air collaborative visual navigation device based on improved graph optimization SLAM includes: a signal acquisition module, a front-end processing module, a back-end processing module, and an information communication module; the signal acquisition module includes a monocular vision sensor; the The front-end processing module includes a signal processing system and data transmission; the back-end processing module includes a data computing system; the information communication module includes a data transmission module and an image transmission module; the signal acquisition module transmits the video signal to the The front-end processing module performs pre-processing, and after obtaining the key frame information and feature point information, it is sent to the back-end processing module, and the back-end proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More