A method for fault location of acs closed-loop system based on ann
A closed-loop system and fault location technology, which is applied in the general control system, control/regulation system, test/monitoring control system, etc., can solve problems such as difficult distinction between actuator faults and sensor faults
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
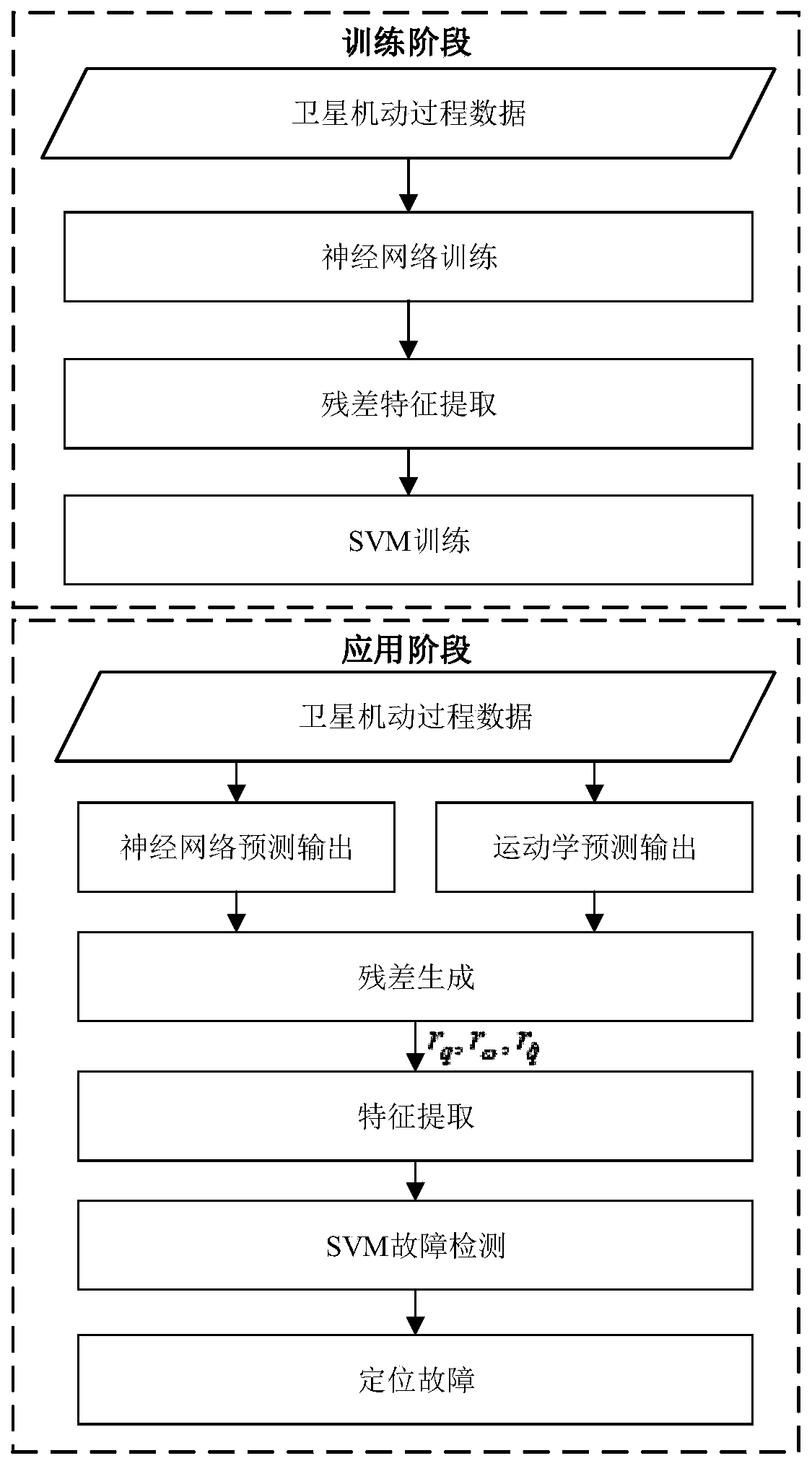
[0064] The specific implementation steps of a kind of ANN-based ACS closed-loop system actuator and sensor fault location method according to the present invention are as follows:
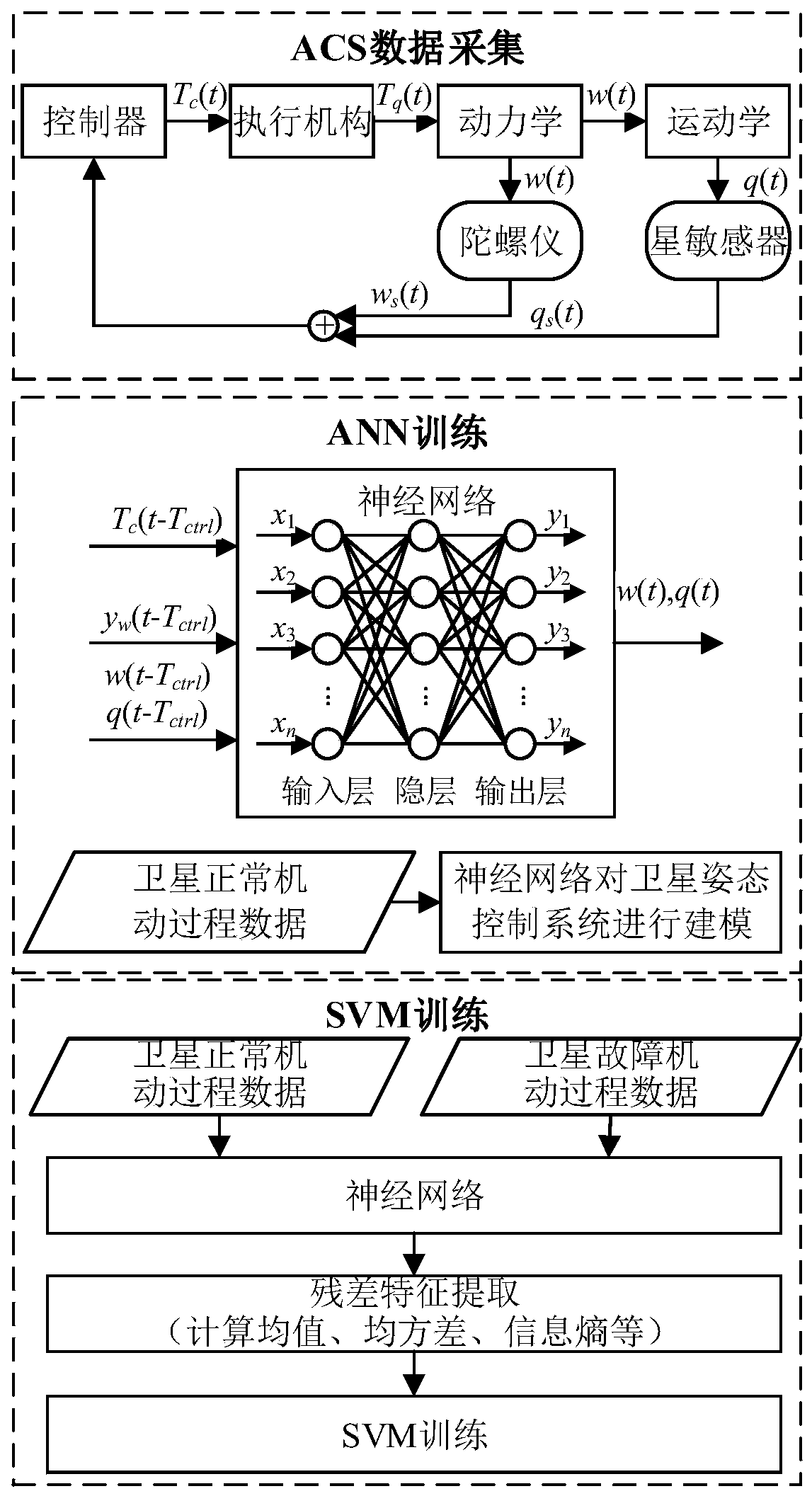
[0065] (1) Collect various sensor data during the satellite attitude maneuvering process, including the momentum wheel command signal, the actual speed of the momentum wheel, star sensor output, gyroscope output and other information. will t-T ctrl Time command signal, momentum wheel speed, star sensor output and gyroscope output are combined as input samples, and star sensor output and gyroscope output are combined as output samples at time t to train ANN, where T ctrl for the control cycle.
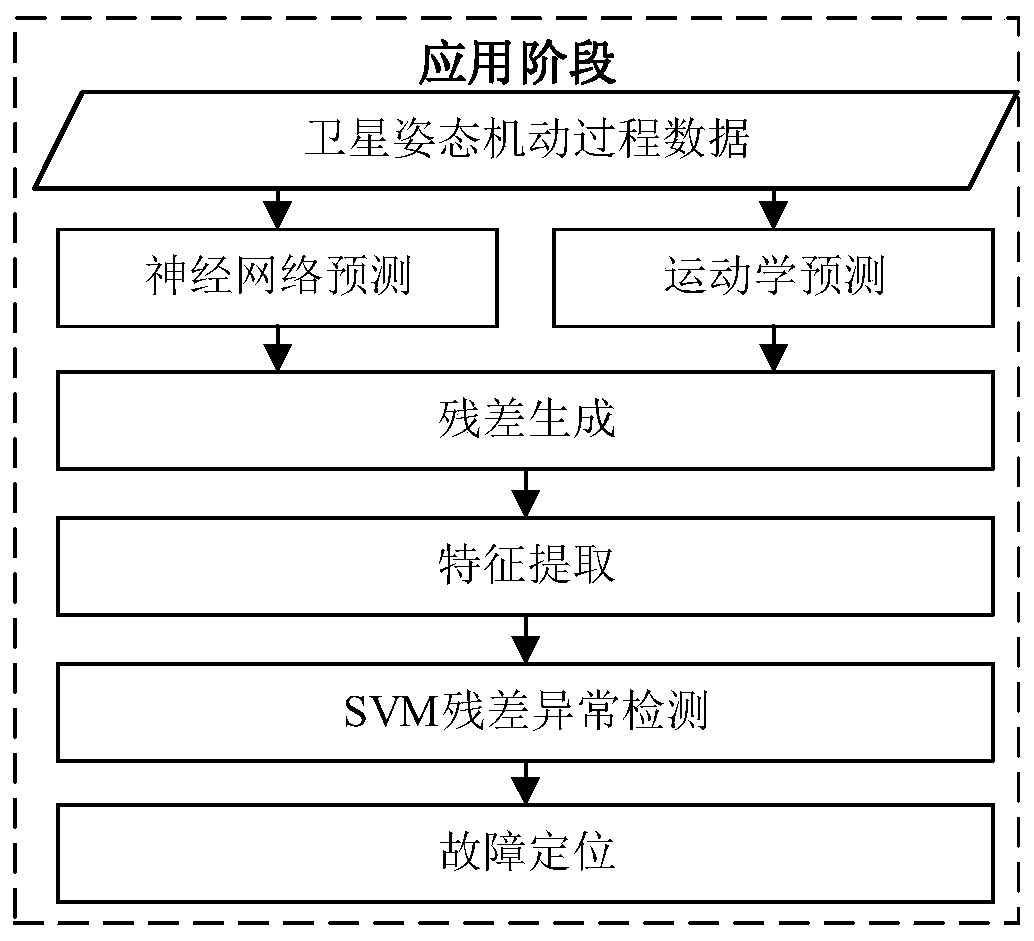
[0066] (2) Use actual satellite signals to construct ANN input samples, and make a difference between the predicted output of ANN and the actual signal output to obtain the residual. In the data window, the mean value, mean square error and information entropy of the residual are calculated to obtain the d...
Embodiment 2
[0082] The part of this embodiment that is the same as the above-mentioned embodiment and the adoption of the prior art will not be described in detail. In this embodiment, the ACS data of multiple maneuvering processes are collected to train the ANN, and the output of the trained ANN is compared with the actual signal to generate a residual. Draw the original signal and ANN output, and draw the residual separately to get Figure 4 . Such as Figure 4 Shown is the ANN modeling accuracy analysis, from Figure 4 It can be seen from the figure that the predicted output of ANN is completely coincident with the real signal of ACS, but the two are not completely consistent from the residual graph. In the early stage of maneuvering, the error of ANN modeling is relatively large, but it is 2 orders of magnitude smaller than the original signal. The accuracy is ideal.
[0083] There are 3 types of fault settings, as shown in the table below.
[0084] point of failure Fa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More