

Miniature wireless endoscopy robot system
A robot system and wireless technology, applied in endoscopy, medical science, surgery, etc., can solve the problems that the working state and working method cannot be controlled outside the body, the doctor cannot control the inspection process, and cannot realize key inspections, etc., to achieve structural Simple, improve timely judgment, the effect of fewer overall components
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
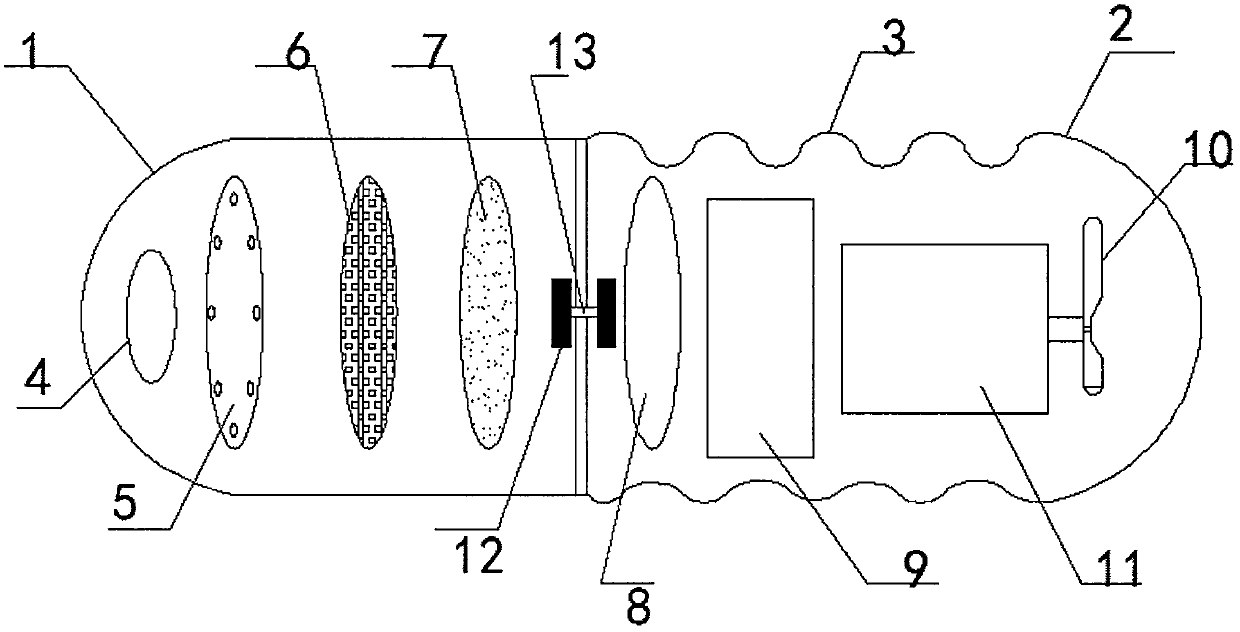
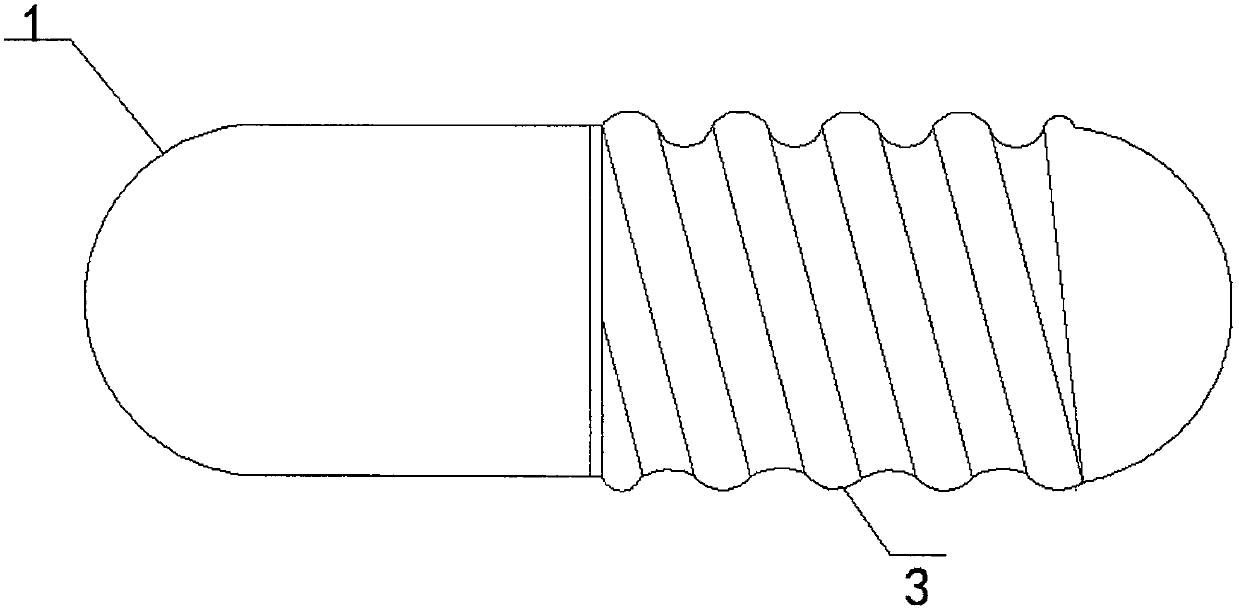
[0025] see Figure 1~3 ,like figure 1 As shown, a micro wireless endoscopic robot system of the present invention includes a first housing 1 and a second housing 2, the first housing 1 is cylindrical, and the second housing 2 is a helical column; The first housing 1 and the second housing 2 are connected by a connecting shaft 13, and the connecting shaft 13 is respectively fixed on the bearings 12 provided in the first housing 1 and the second housing 2, and the slave From the end in the first housing 1 to the connection direction with the second housing 2, a focal length lens 4, an LED lighting module 5, an image transmission module 6 and a signal transceiving module 7 are arranged in sequence; There are an eccentric block 10, a motor 11, a power supply module 9 and a circuit control module 8 in sequence from the inner end to the connection direction with the first housing 1; the eccentric block 10 is connected to the motor shaft of the motor 11 and follows the motor shaft ...
Embodiment 2
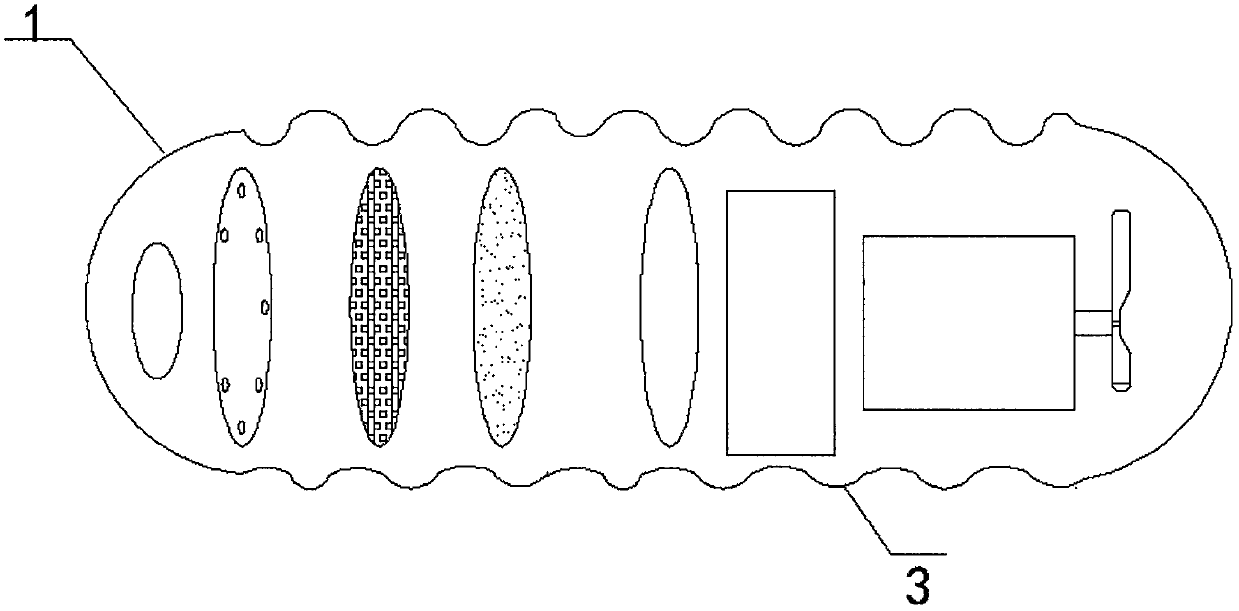
[0034] see image 3 , the solution of the present invention is further optimized. On the basis of the embodiment, the first housing 1 and the second housing 2 are connected as a whole, and the first housing 1 and the second housing 2 are wrapped with a spiral sleeve 3 , the focal length lens 4 is installed on the gyro positioning device to ensure the stability of the focal length lens 4, and the rotation of the eccentric block 10 is used to achieve the effect of moving forward or backward.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More