

Autonomous driving path tracking control method of crawler-type mobile robot
A mobile robot and path tracking technology, applied in adaptive control, non-electric variable control, two-dimensional position/channel control, etc., can solve the problem of large tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
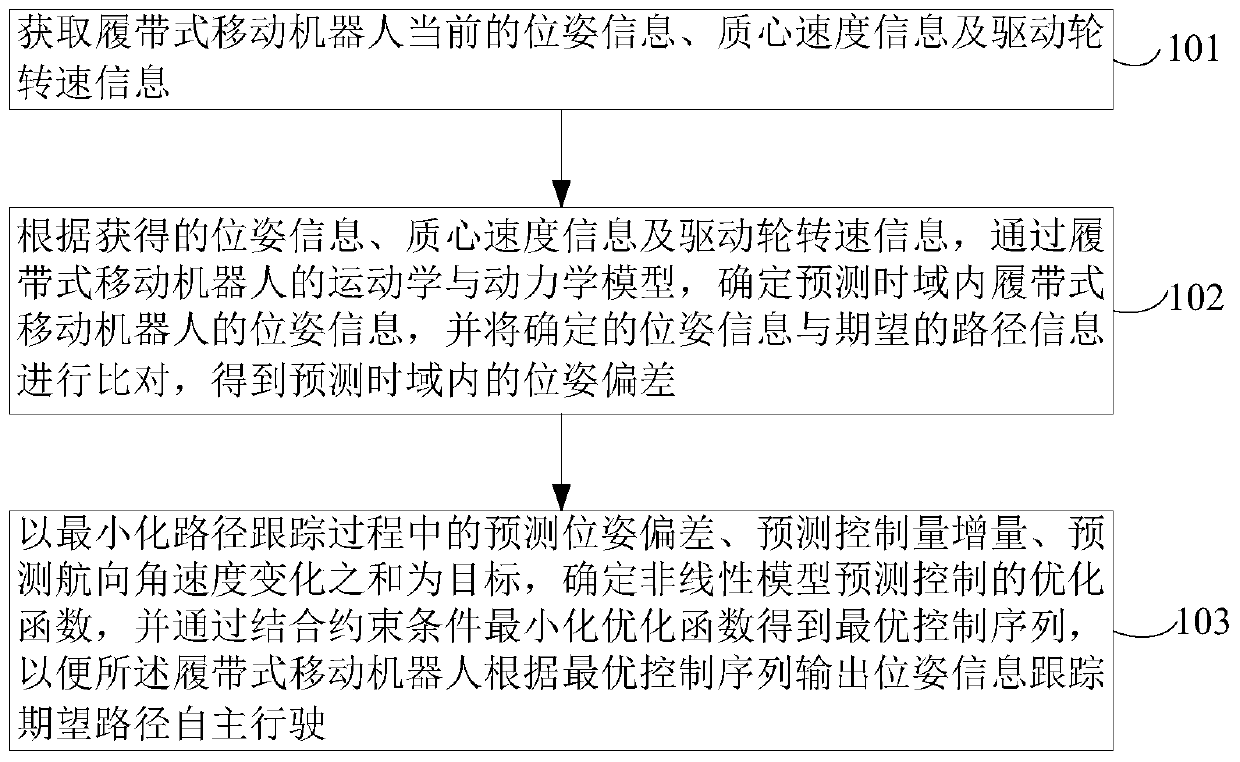
[0056] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
[0057] Aiming at the problem that the existing kinematics model is used alone to describe the path tracking of a crawler mobile robot, which leads to large tracking errors, the invention provides an autonomous driving path tracking control method of the crawler mobile robot.
[0058] The sensor system is the hardware basis for a mobile robot (eg, a crawler mobile robot) to drive autonomously. During the autonomous driving process of the mobile robot, the sensor system can provide the necessary input for the control system of the mobile robot.
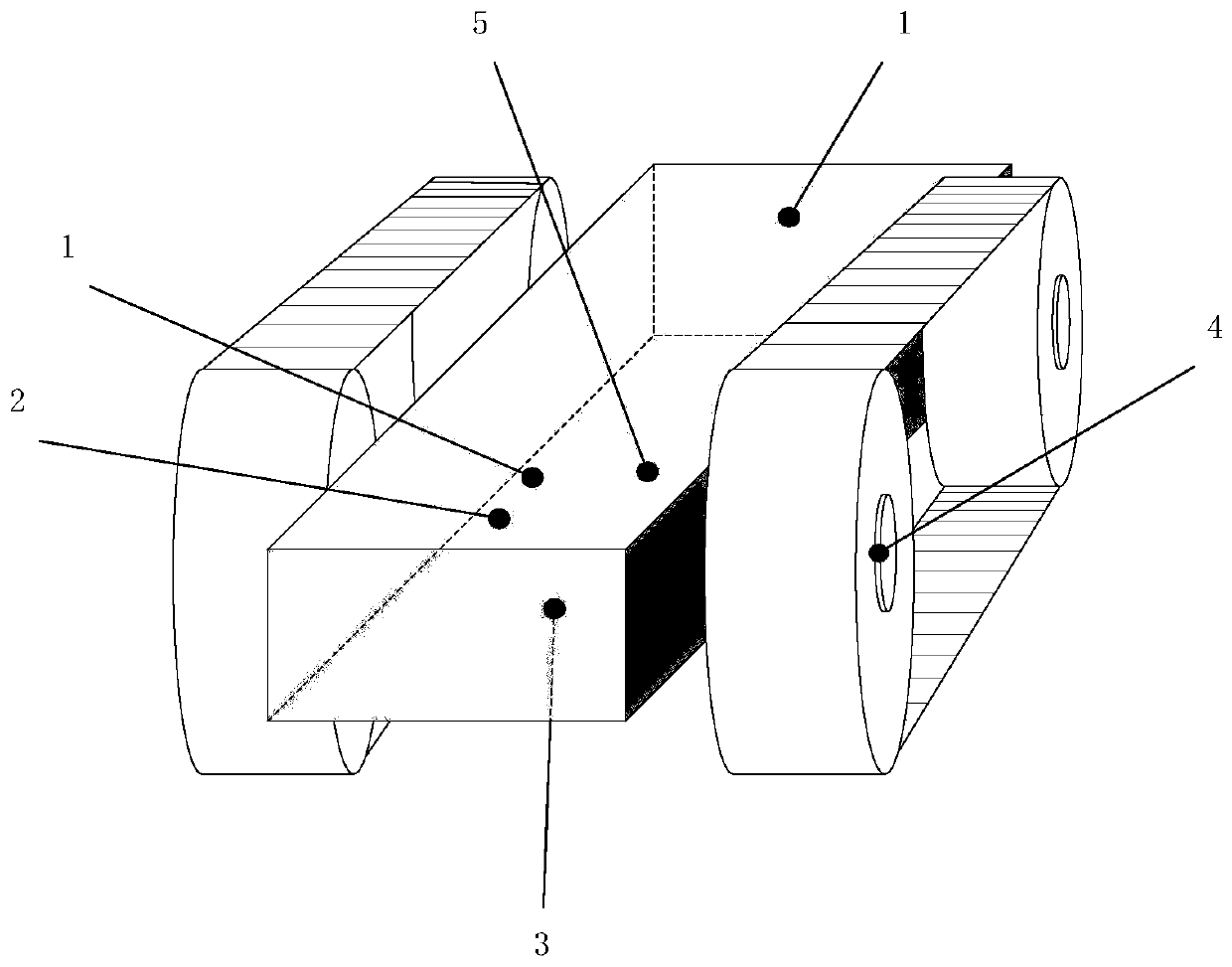
[0059] like figure 1 As shown, in this embodiment, the sensors that need to be used include but are not limited to: laser radar system (including: 2 laser radars 1), ultrasonic range finder 3, inertial navigation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More