

Monocular detection and positioning method for power transmission line inspection robot
A technology for inspection robots and power transmission lines, which is applied in the direction of instruments, computer parts, character and pattern recognition, etc. It can solve the problems of difficult to meet accuracy and real-time performance, imperfect obstacle positioning function, high production cost, etc., and achieve cost Low, improve the detection effect, simplify the structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
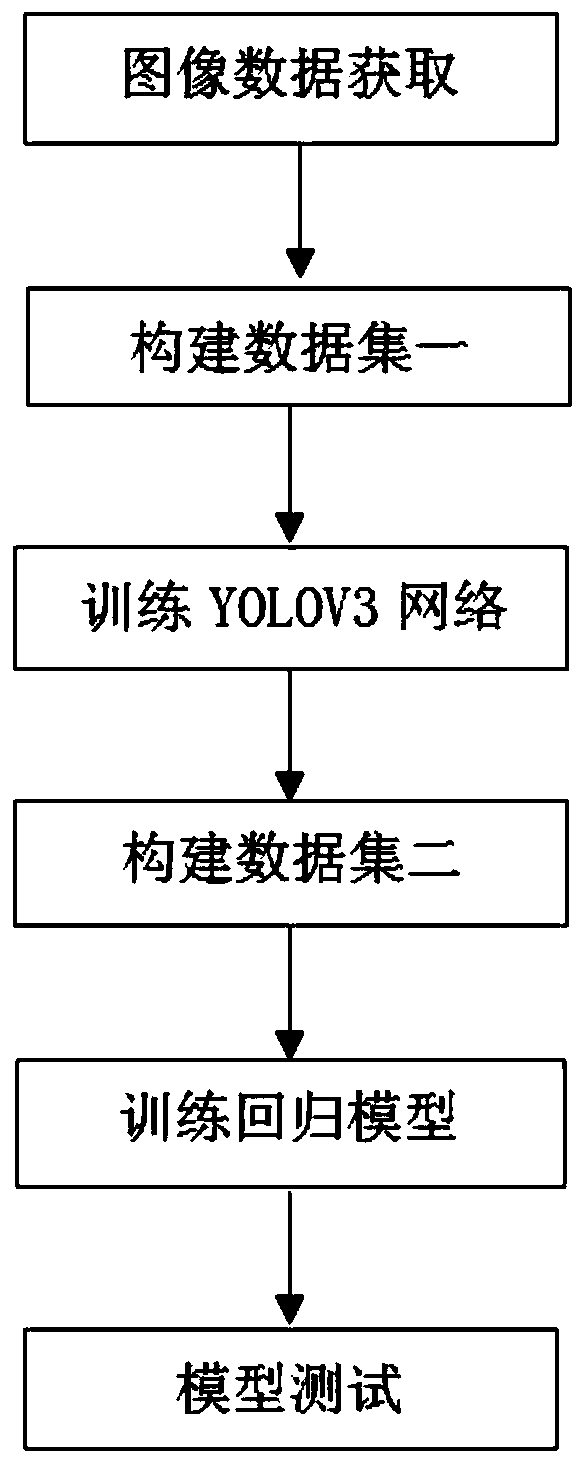
[0038] Such as figure 1 As shown, a transmission line inspection robot monocular detection and positioning method of the present invention includes the following steps:
[0039] Step 1: Use the depth camera to collect color images and depth images of different types of route obstacles. The color image corresponds to the depth image one by one, and the obstacle area in the color image is marked as the target area, and is classified according to the type of obstacle in the target area. To construct data set one;
[0040] During specific implementation, the types of obstacles include anti-vibration hammers, suspension clamps, spacers, strain clamps, and composite insulators. Use the kinect2 depth camera to collect line obstacle images, and write a program to enable it to acquire color images and corresponding depth images at the same time. For the color pictures in the data set, use the LabelImg tool to select the obstacle area, mark the obstacle type and generate an xml file. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More