Verification method, platform and storage medium for expected functional safety of autonomous driving algorithms
A technology of automatic driving and expected functions, which is applied in the direction of motor vehicles, non-electric variable control, two-dimensional position/channel control, etc., can solve the problems such as the lack of comprehensive guarantee of the safety of test and verification results and the lack of the underlying execution system. , to achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
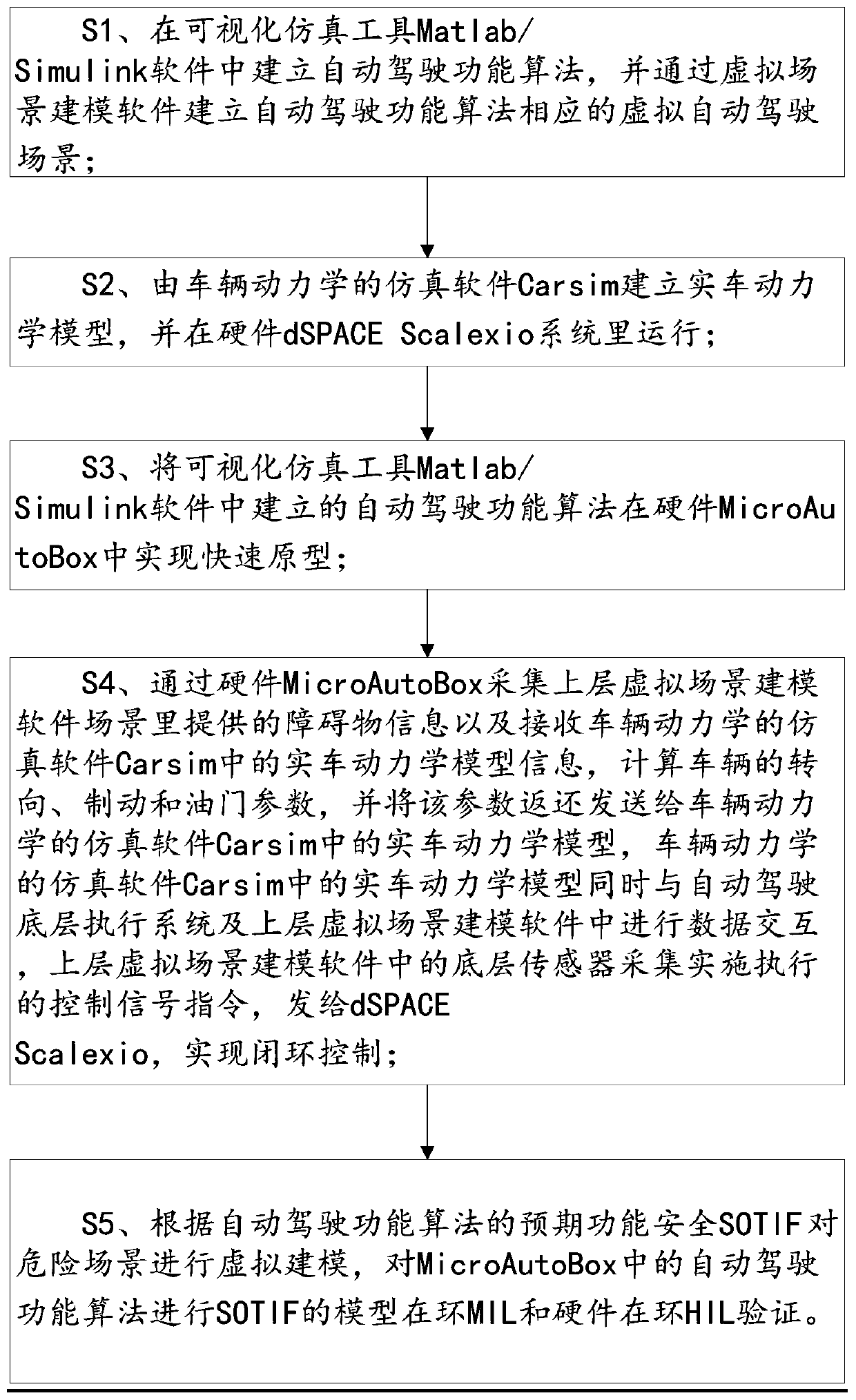
[0038] see figure 1 : This embodiment proposes a method for verifying the expected functional safety of an automatic driving algorithm, and the method specifically includes the following steps:
[0039] S1. Establish an automatic driving function algorithm in the visual simulation tool Matlab / Simulink software, and establish a virtual automatic driving scene corresponding to the automatic driving function algorithm through a virtual scene modeling software (such as Prescan);
[0040] S2. The vehicle dynamics simulation software Carsim establishes the real vehicle dynamics model, and runs it in the hardware dSPACEScalexio system;
[0041] S3. Realize rapid prototyping of the automatic driving function algorithm established in the visual simulation tool Matlab / Simulink software in the hardware dSPACE MicroAutoBox;
[0042] S4. Collect the obstacle information provided in the upper layer virtual scene modeling software Prescan scene through the hardware MicroAutoBox and receive ...
Embodiment 2
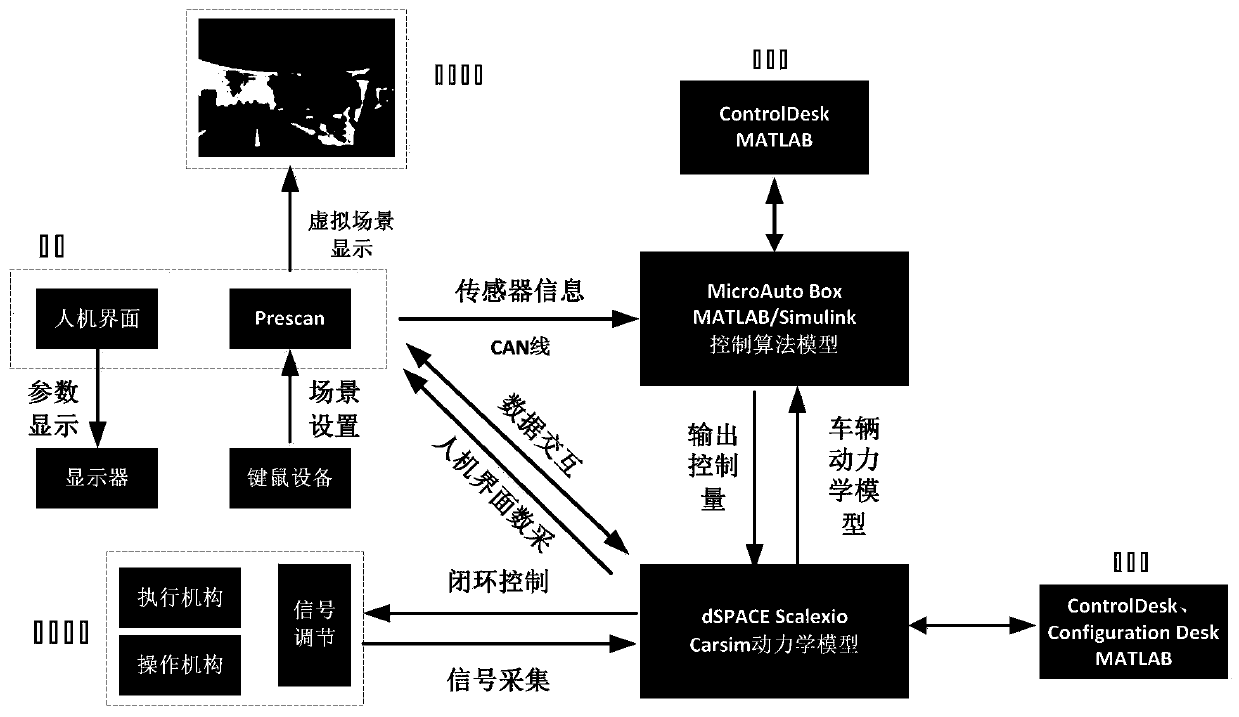
[0053] In addition, to achieve the above purpose, see figure 2 : This embodiment also proposes a verification platform for the expected functional safety of the autonomous driving algorithm, including a host computer, a domain controller dSPACE MicroAutoBox, a lower computer dSPACE Scalexio, and a bottom execution system;
[0054] The upper computer runs the PreScan software and the man-machine interface. The PreScan software is used to provide a virtual driving interface similar to the real test conditions and receive sensor information provided by the autonomous driving millimeter-wave radar and camera environment perception module;
[0055] The domain controller dSPACE MicroAutoBox receives various sensor signals provided by the host computer through the CAN line, performs information fusion to obtain information such as the vehicle speed and position of the target obstacle, and then sends braking, Steering and throttle signal commands;
[0056] The lower computer dSPACE ...
Embodiment 3
[0062] In addition, in order to achieve the above purpose, this embodiment also proposes a storage medium, the storage medium stores a verification program for the expected functional safety of the automatic driving algorithm, and when the verification program for the expected functional safety of the automatic driving algorithm is executed by the processor Steps for realizing the verification method for the expected functional safety of the autonomous driving algorithm described above.
[0063] The serial numbers of the above embodiments of the present invention are for description only, and do not represent the advantages and disadvantages of the embodiments.
[0064] Through the description of the above embodiments, those skilled in the art can clearly understand that the methods of the above embodiments can be implemented by means of software plus a necessary general-purpose hardware platform, and of course also by hardware, but in many cases the former is better implement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com