

Intelligent vehicle automatic driving control method and system
An automatic driving control and intelligent vehicle technology, applied in the control/regulation system, vehicle position/route/altitude control, non-electric variable control and other directions, can solve the problem that automatic driving cannot adaptively complete online learning, etc., to meet real-time requirements Demand, strong adaptability, and the effect of improving ride comfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 2
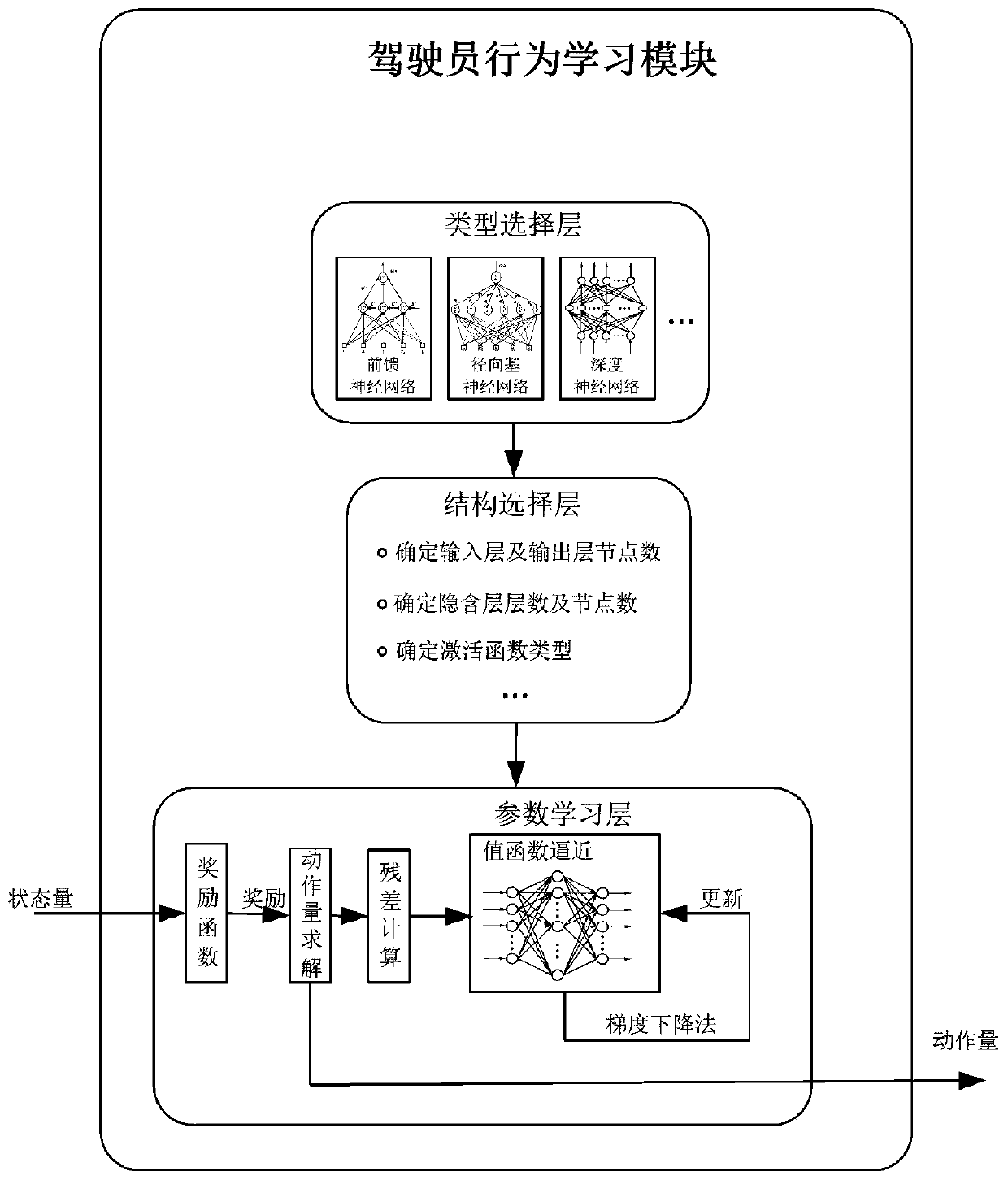
[0080] Embodiment 2 of the present invention has provided another kind of method of training driver's behavior learning model, as figure 2 shown.
[0081] When the driving subtask is a lane keeping subtask or a lane changing subtask, the model is not complicated because this type of learning task is relatively simple. Therefore, the feed-forward neural network with simple structure and fast solution speed is selected. The number of nodes in the input layer and output layer depends on the reinforcement learning method adopted. The number of hidden layers is preferably a single layer to simplify the model and avoid overfitting. The number of hidden layer nodes can be calculated according to the empirical formula ( m is the number of nodes in the hidden layer, n is the number of nodes in the input layer, and l is the number of nodes in the output layer). The activation function of the output layer usually chooses a linear function to simplify training, and the activation fun...
Embodiment 3
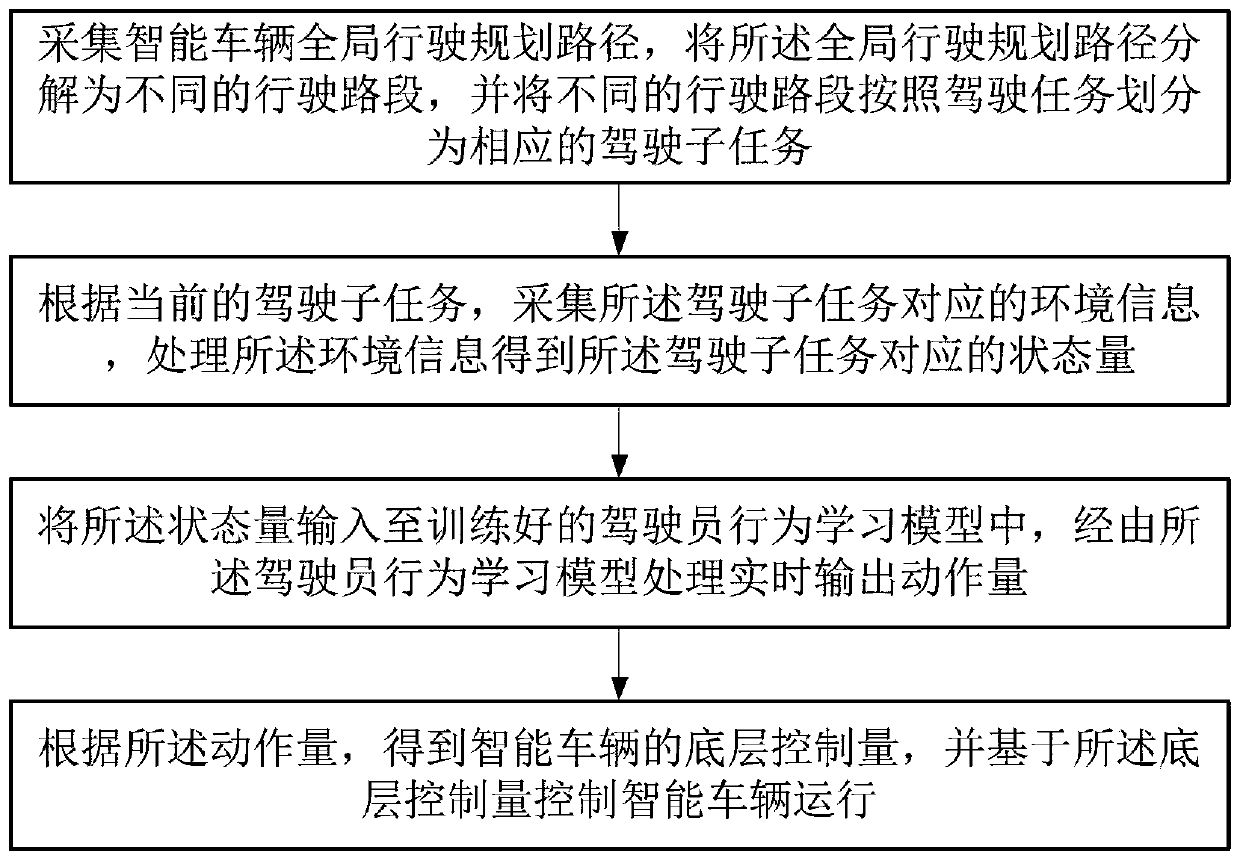
[0098] The invention also discloses an intelligent vehicle automatic driving control system, the structural diagram is as follows image 3 As shown, it includes: a path decomposition module, which is used to collect the global driving planning path of the intelligent vehicle, decompose the global driving planning path into different driving sections, and divide the different driving sections into corresponding driving sub-tasks according to the driving tasks; The state quantity generation module is used to collect the environmental information corresponding to the driving subtask according to the current driving subtask, and processes the environmental information to obtain the state quantity corresponding to the driving subtask; The state quantity is input into the trained driver behavior learning model, and the real-time output action quantity is processed through the driver behavior learning model; the execution module is used to obtain the underlying control quantity of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More