

Retinal blood vessel injector and injection method thereof for ophthalmic surgery robot
A technique for retinal blood vessels and ophthalmic surgery, applied in ophthalmic surgery, etc., can solve problems such as limited needle tip movement, secondary injury, and patients with failed injections, and achieve the effects of simplifying the transmission structure, avoiding assembly errors, and positioning accurately
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
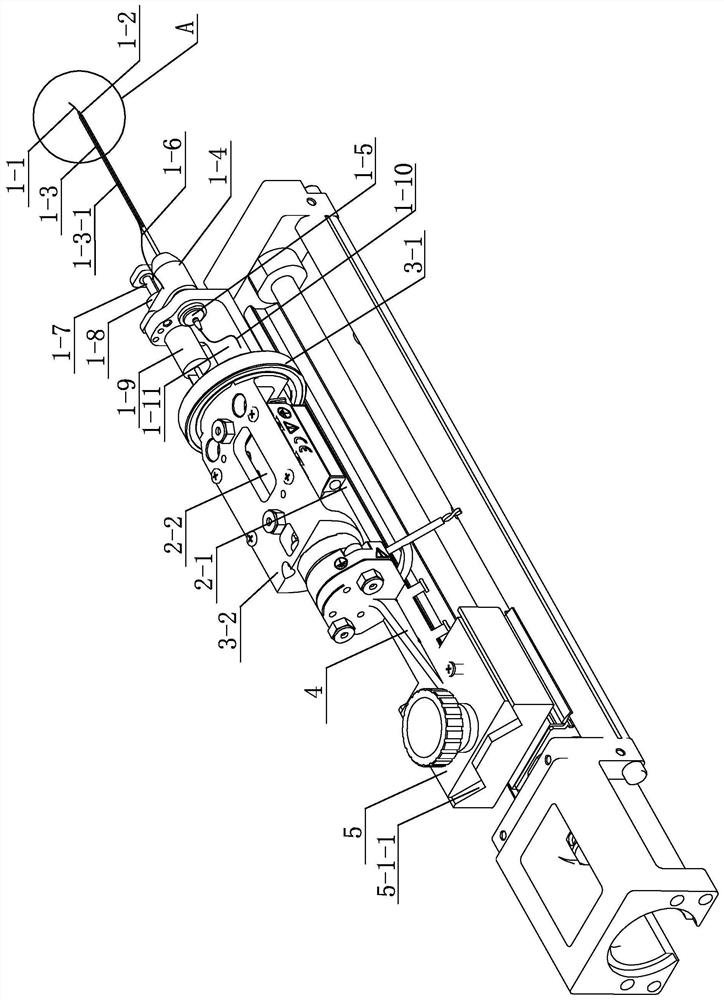
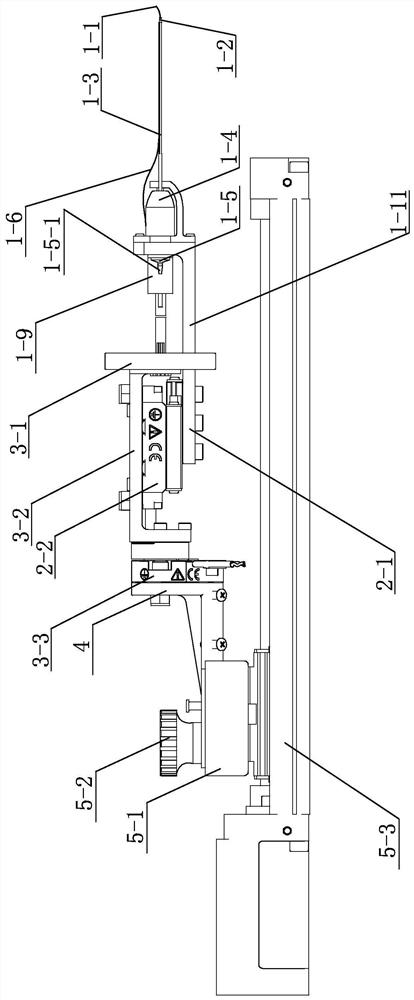
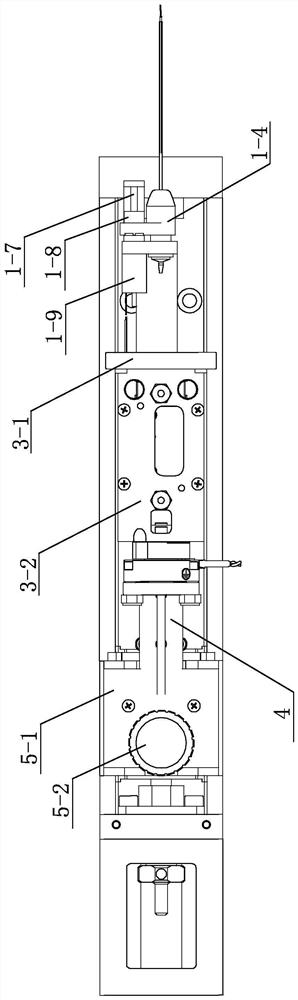
[0029] Specific implementation mode one: combine Figure 1 to Figure 5 Describe this embodiment, a retinal blood vessel drug injector for an ophthalmic surgery robot in this embodiment includes an actuator fixing base 4, which also includes a needle tube group module 1, a feed module 2 and a rotation module 3, and the needle tube group module 1 Installed on the feed module 2 and driven by the feed module 2, the feed module 2 is installed on the front of the rotation module 3, and the needle tube group module 1 and the feed module 2 are driven by the rotation module 3. Rotation, the rotation module 3 is installed on the actuator fixing seat 4; the needle tube set module 1 includes a needle tip 1-1, an inner tube 1-2, an outer tube 1-3, an outer tube connector 1-4, an inner tube connector 1- 5. Bragg fiber grating 1-6, lead screw 1-7, lead screw nut 1-8, stepper motor 1-9, injection hose 1-10 and installation frame 1-11, the installation frame 1-11 is installed in the For the f...
specific Embodiment approach 2
[0033] Specific implementation mode two: combination Figure 1 to Figure 3 with Figure 5 The present embodiment will be described. The tip 1-1 of this embodiment has an upward bend of 45° at its end, and the diameter of the needle tip 1-1 is 0.4 mm. Such setting facilitates accurate oblique insertion into blood vessels during operation. Other compositions and connections are the same as in the first embodiment.
[0034] When the needle of this embodiment is inserted into the blood vessel, it generally needs to be inserted at a certain angle. If it is inserted vertically into the blood vessel, it is very easy to puncture the whole blood vessel. Experiments have proved that the best inclination angle is generally 25-35 degrees. For this purpose, the needle tip designed in this project has a 45-degree angle bend, which is matched with the angle difference between the inner and outer tubes and the blood vessel, so that the angle between the needle tip and the blood vessel durin...
specific Embodiment approach 3
[0035] Specific implementation mode three: combination Figure 1 to Figure 3 Describe this embodiment, the feed module 2 of this embodiment includes a feed connector 2-1 and a direct-motion inertia piezoelectric motor 2-2, the feed connector 2-1 is connected to the mounting frame 1-11, and the direct-motion inertia The piezoelectric motor 2-2 is installed on the feeding connector 2-1 and drives the needle tube group module 1 to complete the linear feeding action. In this way, the direct-motion inertial piezoelectric motor 2-2 is connected to the feed connector 2-1 through bolts. The feeding connector is connected with the needle tube group module 1 at the same time, so as to achieve the purpose of pushing the entire needle tube group to complete the linear feed motion through the direct-motion inertial piezoelectric motor 2-2. Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
[0036] The upper end surface of the feed connector 2-1 in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More