

Command-constraint-based fixed time control method for trajectory tracking of unmanned surface vessel
A fixed time, track tracking technology, applied in the field of ships, can solve problems such as poor reliability, optimization, and poor robustness of the control system, and achieve the goal of eliminating static interference errors, ensuring robustness, and realizing fast track tracking Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
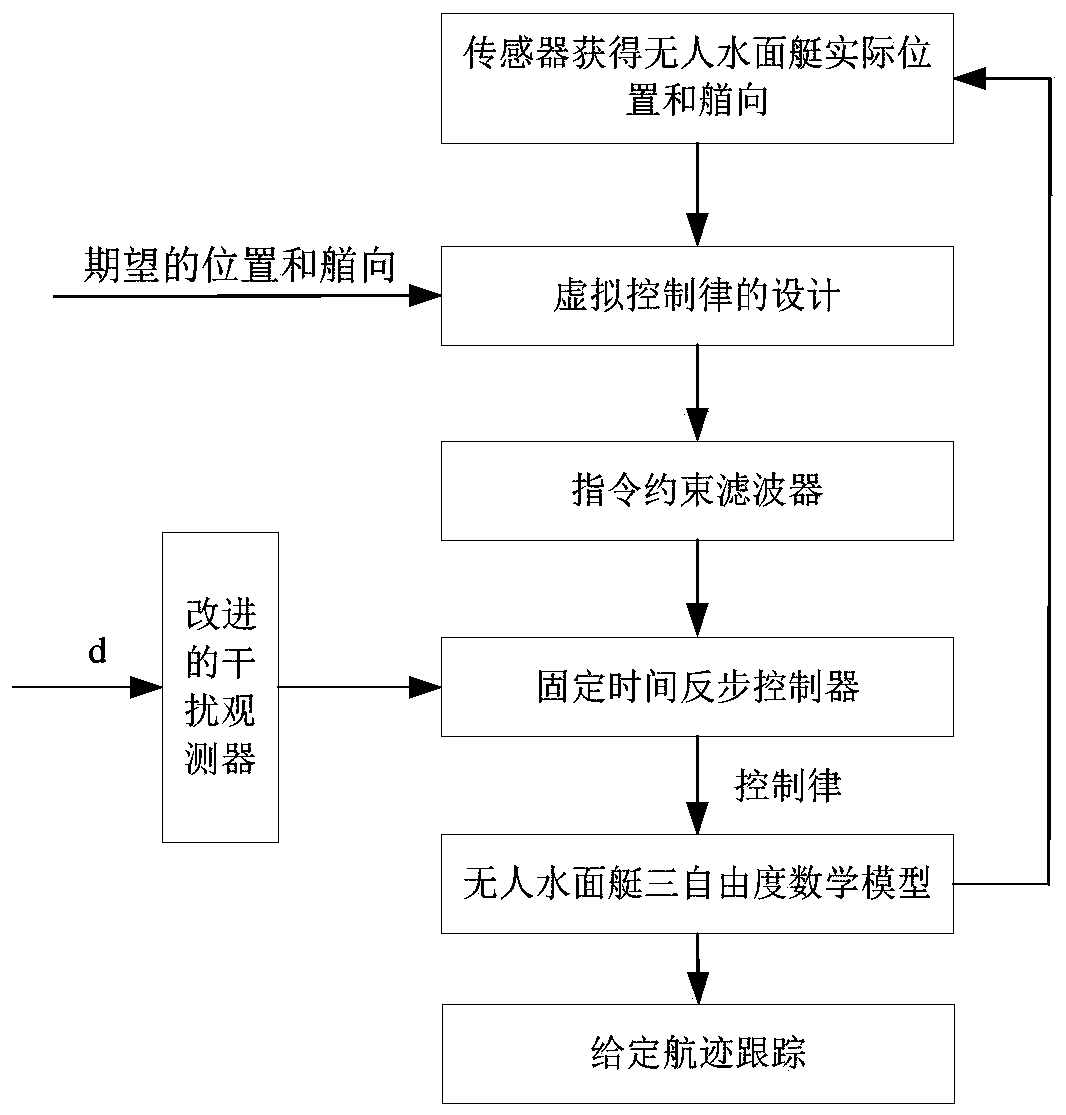
[0067] The fixed-time control method of unmanned craft's track tracking based on command constraint filter and improved interference observer described in this embodiment, such as figure 1 As shown in the following steps:
[0068] Step 1: Collect the actual position information and heading information of the unmanned surface craft;
[0069] Step 2: Design the virtual control law based on the unmanned surface craft model and the desired position and heading information;
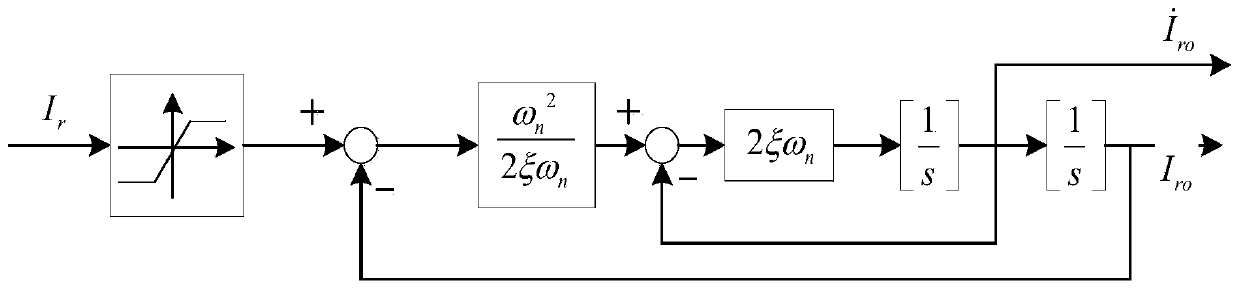
[0070] Step 3: Design the second-order command constraint filter according to the unmanned surface craft model;
[0071] Step 4: Design an improved interference observer based on the unmanned surface craft model;
[0072] Step 5: Design a fixed-time anti-step controller to realize the track tracking control of the unmanned surface craft.
[0073] Step 6: Simulation of the given path tracking of the unmanned surface craft.
[0074] This embodiment includes the following beneficial effects: This embodiment introduces a comm...
Embodiment 2
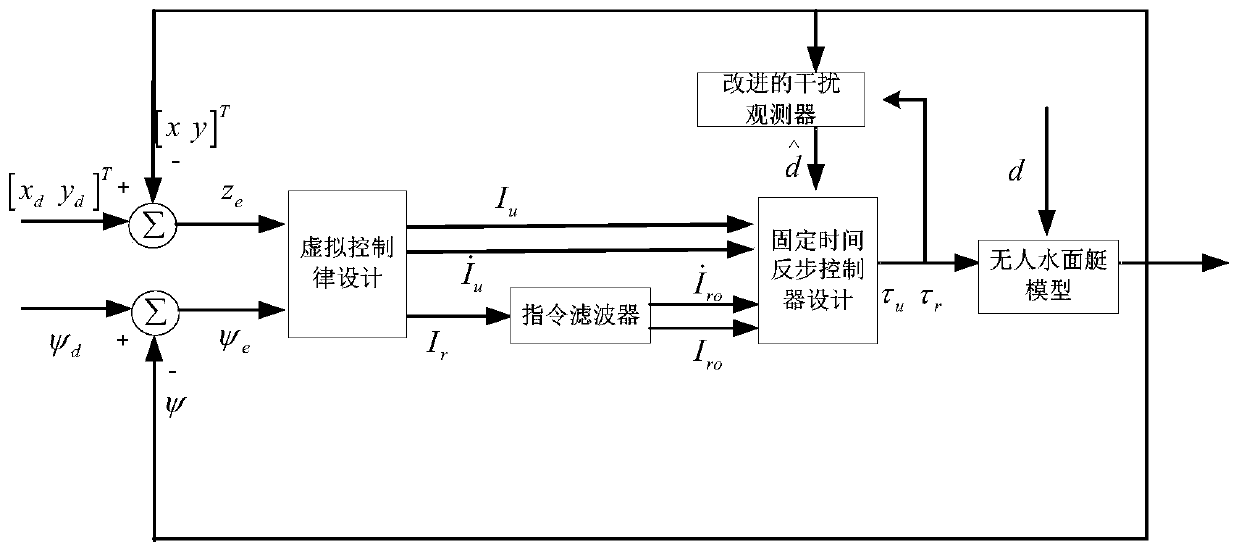
[0076] This embodiment is a further description of an unmanned craft's track tracking fixed-time backstepping control method based on a command constraint filter and an improved interference observer, such as figure 2 The block diagram of the control system is shown, and the detailed implementation process is as follows:
[0077] Step 1. Establish a three-degree-of-freedom mathematical model for unmanned surface craft:
[0078]
[0079] Among them: η=[x,y,ψ] T Indicates the position and heading angle of the unmanned boat; υ=[u,v,r] T Represents the speed and angular velocity of the unmanned boat; M=diag{m,m,I z } Represents the mass and moment of inertia of the unmanned boat; τ=[τ u ,0,τ r ] T Represents control force and control torque; τ w =[τ wu τ wv τ wr ] T It represents the component force of the environmental force acting on the three degrees of freedom; C(υ) represents the Coriolis centripetal force matrix, D(υ) represents the damping coefficient matrix and R(ψ) represent...
Embodiment 3
[0126] This embodiment is a further description of a fixed-time control method for unmanned surface craft track tracking based on a command constraint filter and an improved interference observer. Combined with the controller designed in the present invention, a given route is selected for tracking simulation process as follows:
[0127] First, the marine environmental parameters during the simulation process are given: the wind speed is 5m / s, and the wind direction is 45°.
[0128] Then a fixed-time track tracking controller based on command constraint filters and improved interference observers is used to simulate an unmanned surface craft as the control object, such as Figure 5 Shown. The curve comparison between the expected and actual trajectory is shown. The red line represents the expected speed and the desired route, the red dot represents the ship’s departure point, and the blue line represents the actual speed and actual position information. The expected speed is 7 knot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More