

Low-energy loss robot full coverage path planning method and system
A path planning, robot technology, applied in the field of mobile robots, can solve the problem of low efficiency of full coverage cleaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] In order to better understand the technical solutions of the present invention, the implementation manners of the present invention will be further described below in conjunction with the accompanying drawings.
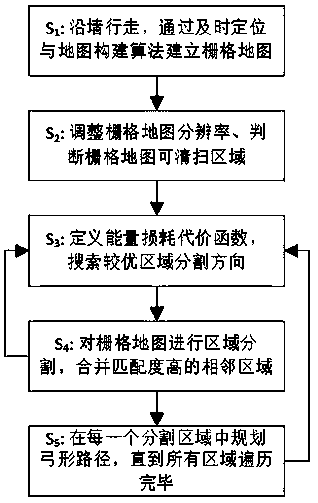
[0073] see figure 1 , figure 1 It is a schematic flowchart of a low-energy-loss robot full-coverage path planning method of the present invention, and the specific process is as follows:
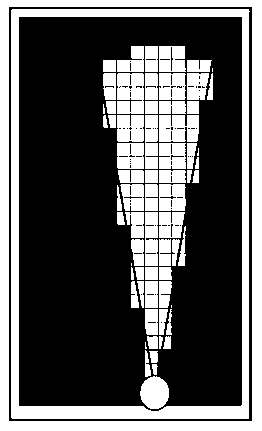
[0074] S1: Integrate the robot encoder, IMU and range finder information, and use real-time positioning and map construction algorithms to establish an environmental grid map. The specific steps are as follows:
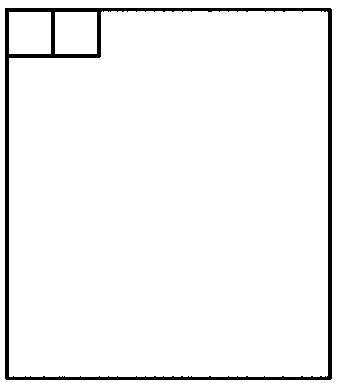
[0075] S11: Starting from the charging pile of the cleaning robot, initialize the grid map, and divide the space into a limited number of grid units by occupying the grid map:
[0076] m=m i
[0077] Among them, m i Indicates the i-th grid cell, each m i Corresponds to a three-valued occupancy variable that indicates whether the unit is occupied. If the grid i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More