

Excavating working face patrolling robot and application thereof
A technology for inspection robots and mining working faces, which is applied to instruments, manipulators, motor vehicles, etc., can solve problems such as obstacle-surpassing ability, poor passability, large frictional resistance, and low movement efficiency, and achieve scientific and reasonable structural design. Ground area, the effect of improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
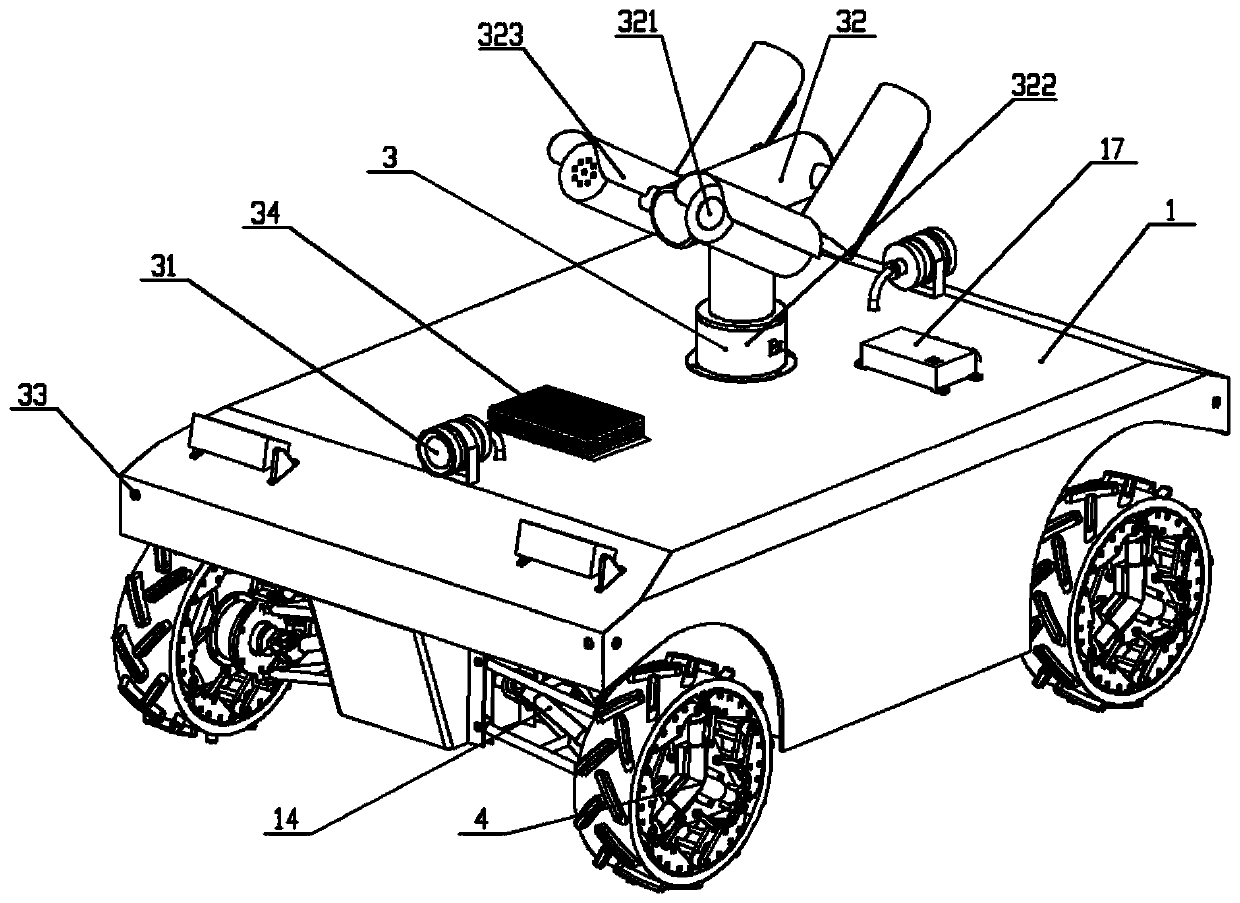
[0055] like Figure 1 to Figure 12 As shown, the present embodiment provides a mining working face inspection robot, the inspection robot mainly includes a body 1, an explosion-proof omnidirectional vehicle-mounted platform 32, a sensor integration module 34, an explosion-proof infrared camera 31, and an intrinsically safe wireless communicator 17 ;
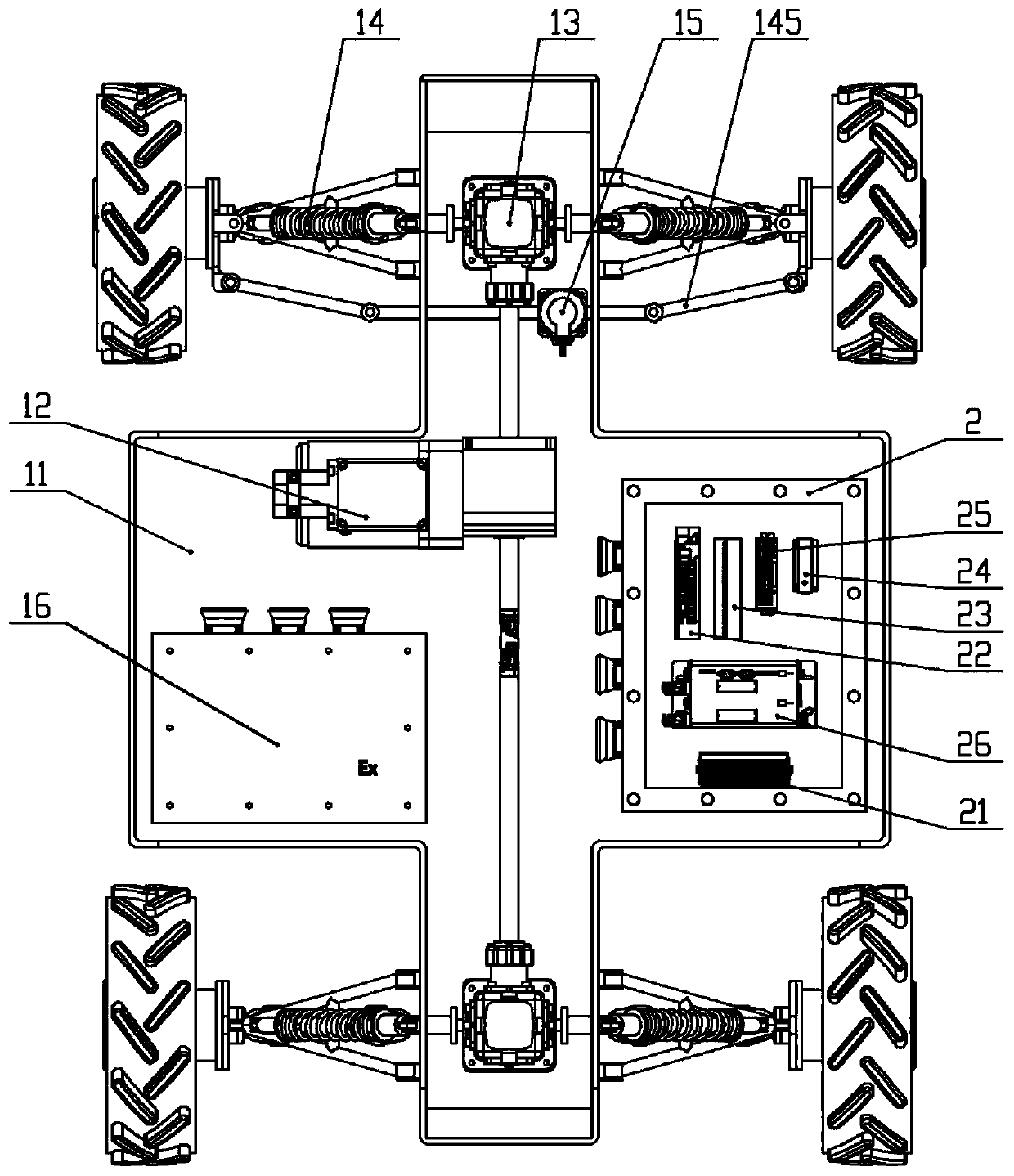
[0056] The body 1 includes a frame 11, an explosion-proof servo motor 12, a transmission device 13, an independent suspension device 14, a running device 4, an explosion-proof steering gear 15, an explosion-proof intrinsically safe power supply 16 and an explosion-proof box 2, wherein the explosion-proof servo motor 12, the explosion-proof The intrinsically safe power supply 16, the explosion-proof steering gear 15, and the explosion-proof box 2 are all installed on the bottom of the frame 11. Four independent suspension devices 14 are symmetrically arranged on the front, rear, left, and right sides of the frame 11. The explosio...
Embodiment 2
[0072] As the working method of the excavation working face inspection robot described in embodiment 1, the specific working process is as follows:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More