Three-rod type device and method for measuring robot tool coordinate system
A technology of tool coordinate system and measuring device, applied in the direction of mechanical measuring device, measuring device, adopting mechanical device, etc., to achieve the effect of enhanced flexibility, simple structure and convenient installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
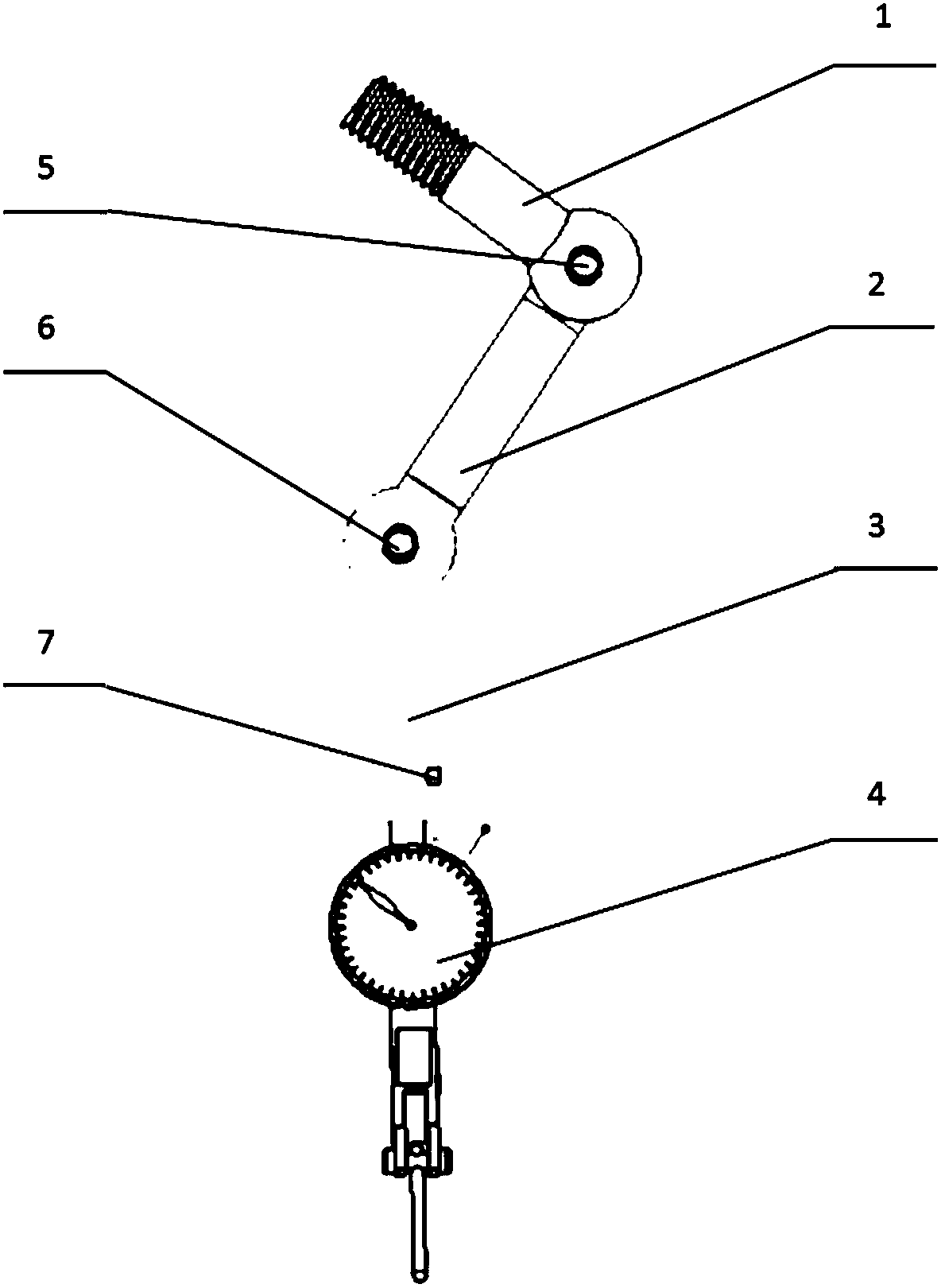
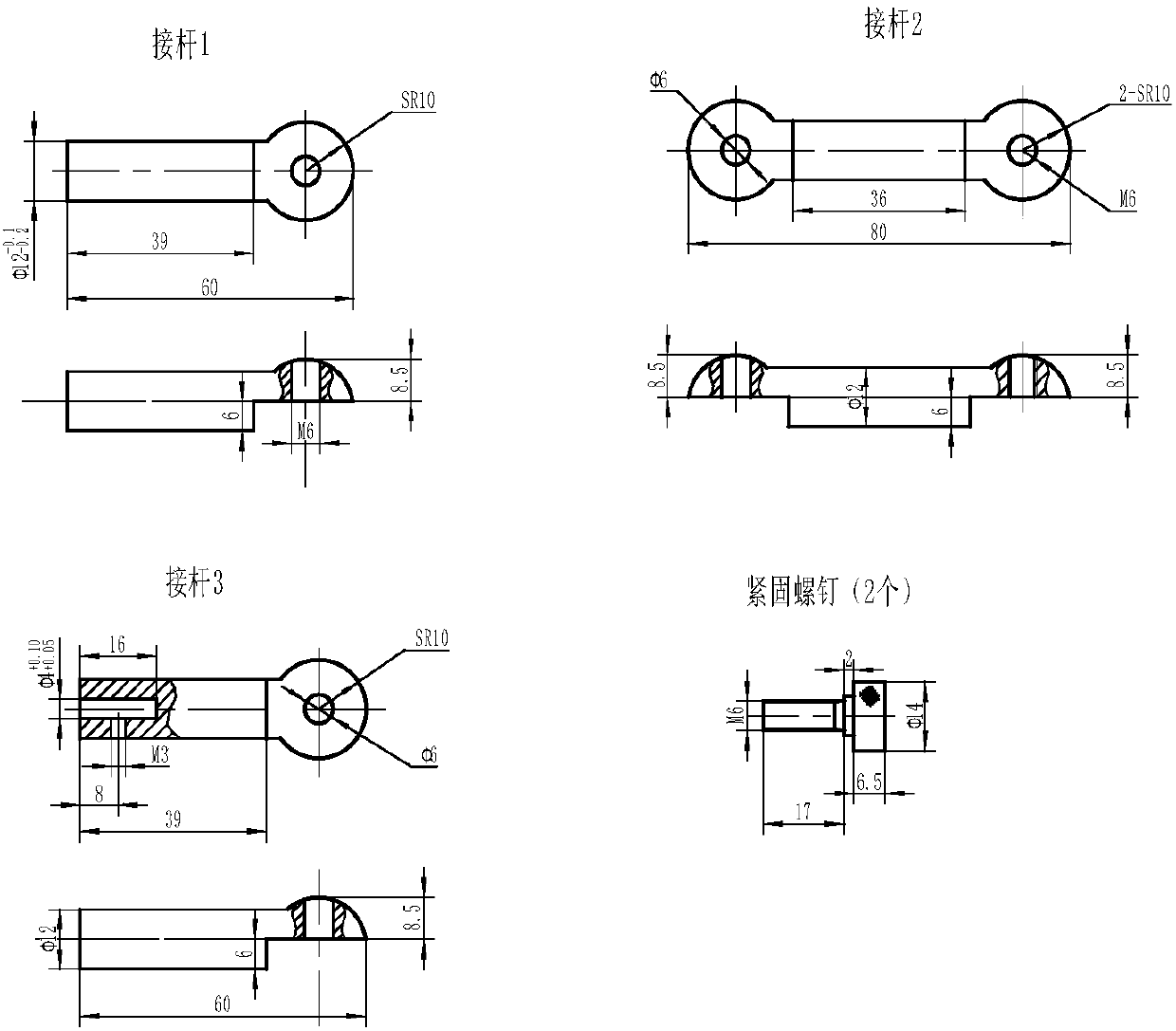
[0037] The present invention provides a three-bar connecting device for robot tool coordinate system measurement, which includes a connecting rod 1, an adapter rod 2, and a meter connecting rod 3, and a three-bar connecting device with two joints composed of a lever dial indicator 4 measuring device.
[0038] One end of the connecting rod 1 is connected to the reserved installation hole of the robot flange through a threaded structure, and the other end is connected to the connecting rod 2 through the connecting bolt 5. After manually adjusting the rotation angle, the fixed position is locked, and it is the connecting piece on the first joint of the whole device. Form the first rotational degree of freedom.
[0039] One end of the adapter rod 2 is connected to the connecting rod 1 through the fastening screw 5, and the other end is connected to the connecting rod 3 through the fastening screw 6. After manually adjusting the rotation angle, the fixed position is locked, and it ...
Embodiment 2
[0044] The present invention also provides a three-bar device and method for measuring the robot tool coordinate system, which includes the following steps:
[0045] The first step is to connect the connecting rod 1 of the assembled three-bar device with the mounting hole of the robot hand flange through threads.
[0046] The second step is to adjust the rotation angle of the connecting rod 2 and the table connecting rod 3 to reach the required measurement position, and lock the connecting bolt 5 and the connecting bolt 6.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap