

Control method of capture recovery device of unmanned aerial vehicle
A control method and recovery device technology, applied to unmanned aircraft, motor vehicles, aircraft parts, etc., can solve the problems of personal safety hazards of unmanned aerial vehicles, small size and flexibility of drones, black flying of drones, etc. , to achieve the effect of improving the capture success rate, excellent safety and stability, and no dead angle in the ranging and positioning range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
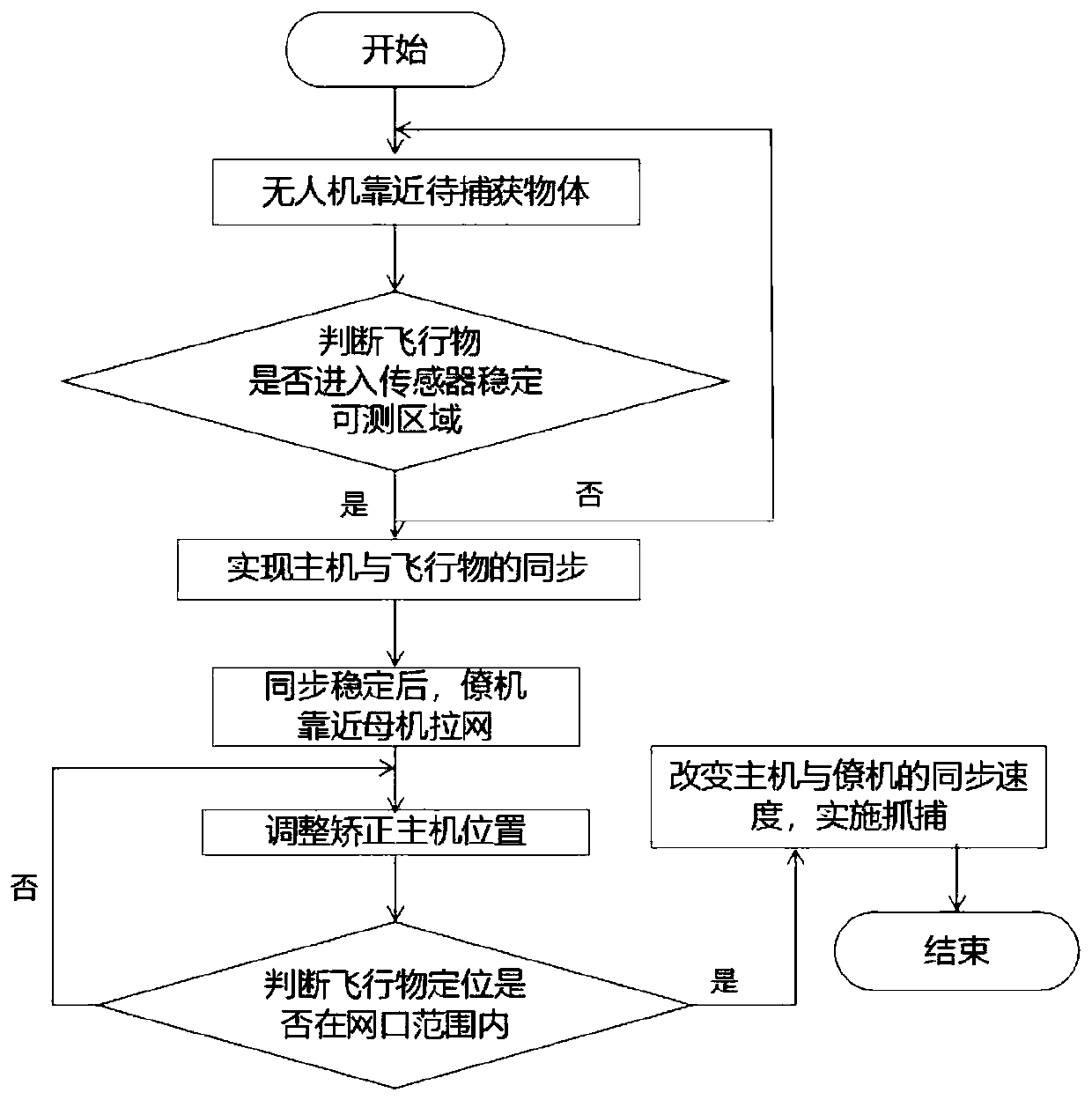
[0027] The present invention is described in detail below in conjunction with accompanying drawing and embodiment:
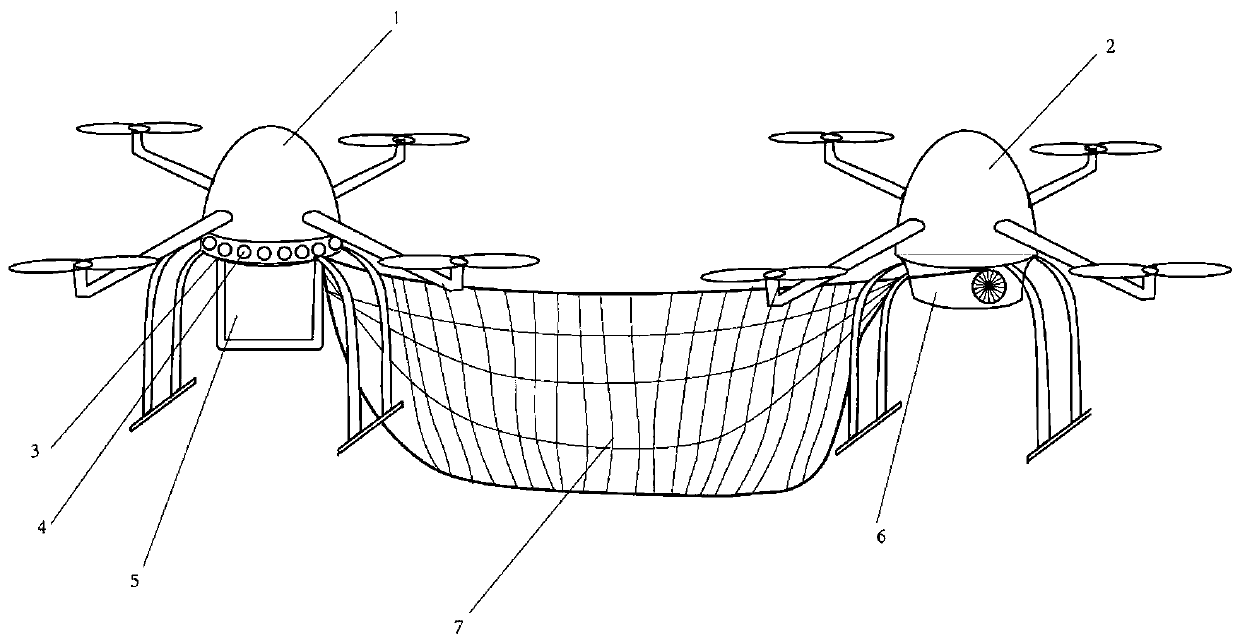
[0028] The capture and recovery device of the unmanned aerial vehicle of the present invention includes three main parts of a host, a wingman and a capture net device, and an ultrasonic sensing positioning and signal receiving system respectively installed between the host and the wingman.
[0029] The host is connected with the wingman with a cable;
[0030] The host is equipped with an ultrasonic distance measuring system, which is used to receive signals and control the ardruino board of the propeller controller, and the capture net storage box for storing the capture net is installed below;
[0031] The wingman is equipped with a receiver for receiving signals from the main engine, and a motor for pulling and deploying the capture net is installed below.
[0032] The catching net device includes a catching net, a catching net storage box fixed under the hos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More