

Laser navigation AGV high-precision positioning method based on two-dimensional code
A technology of laser navigation and positioning method, which is applied in two-dimensional position/channel control, vehicle position/route/altitude control, electromagnetic wave re-radiation and other directions, which can solve the problems of high cost and high parallelism requirements of code tape sticking. , to achieve the effect of low cost and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The present invention will be further described below in conjunction with drawings and embodiments.
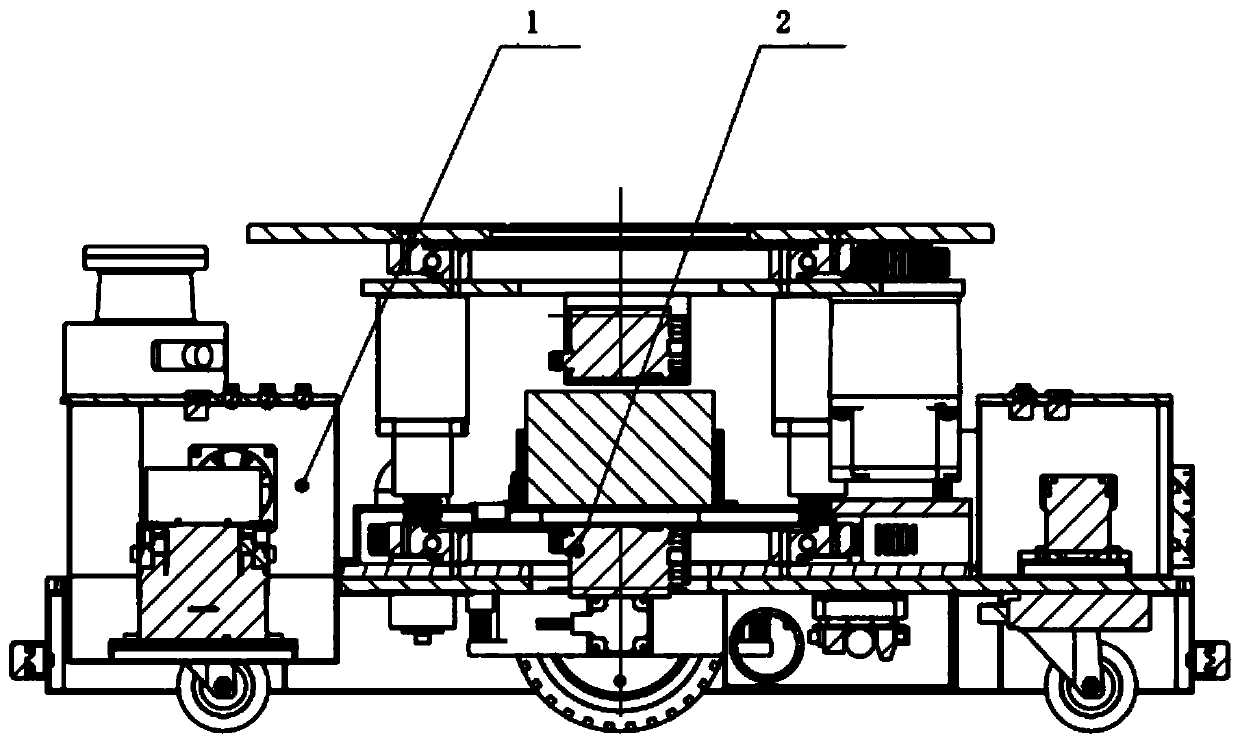
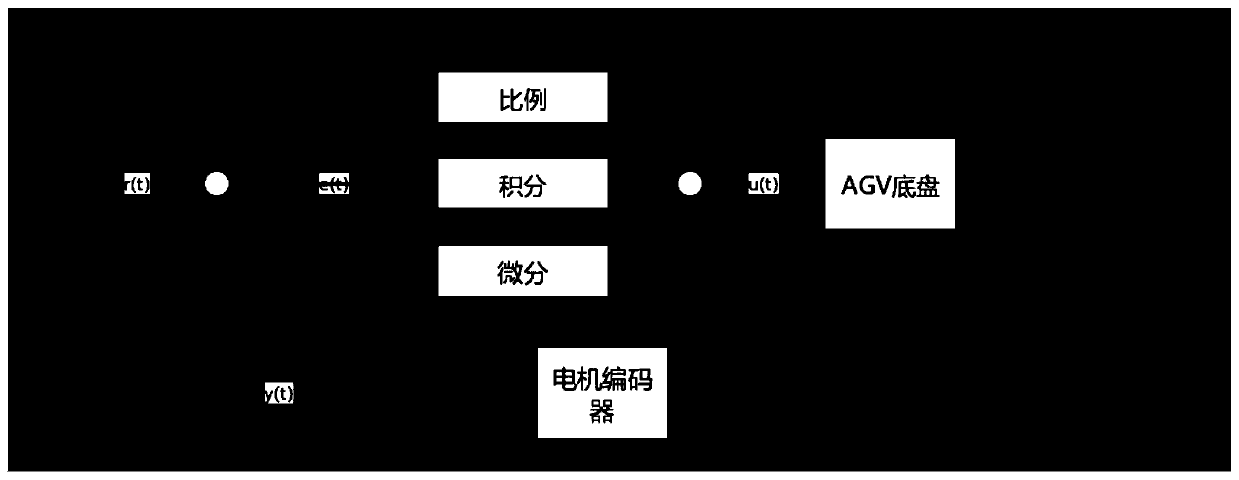
[0027] Such as figure 1 As shown, a high-precision positioning method for a laser navigation AGV based on a two-dimensional code in this embodiment is applied to a latent jack-up AGV. The AGV includes an AGV body 1 with a laser navigation device, and the AGV body includes a PID A controller, a chassis driver, a chassis encoder and a servo motor driving the left and right wheels. The AGV body 1 is also provided with a two-dimensional code camera 2. The two-dimensional code camera 2 is installed in the center of the AGV body and faces the ground below. The camera coordinate system of the two-dimensional code is consistent with the coordinate system of the AGV body. The forward direction of the AGV is defined as the X positive direction, the left side is the Y positive direction, and the angle is positive when the AGV body turns counterclockwise.
[0028] Among them, the ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Vertical distance | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More