

Gantry-type automatic fruit harvesting robot
A gantry-type, robot technology, applied in the field of agricultural robots, can solve the problems of low work efficiency, high labor intensity, long time consumption, etc., and achieve the effect of reducing labor volume, high degree of automation, and wide application scenarios.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
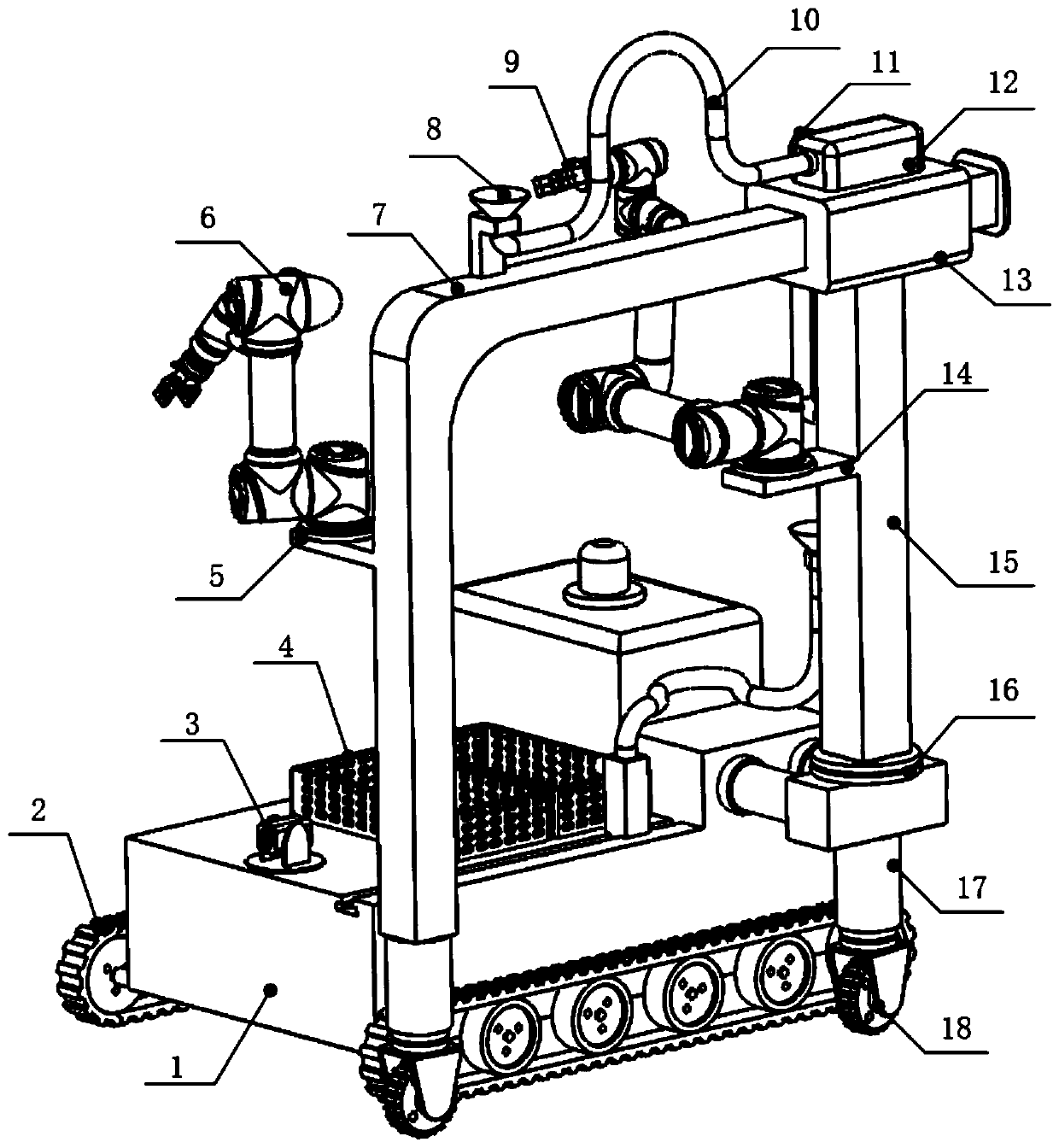
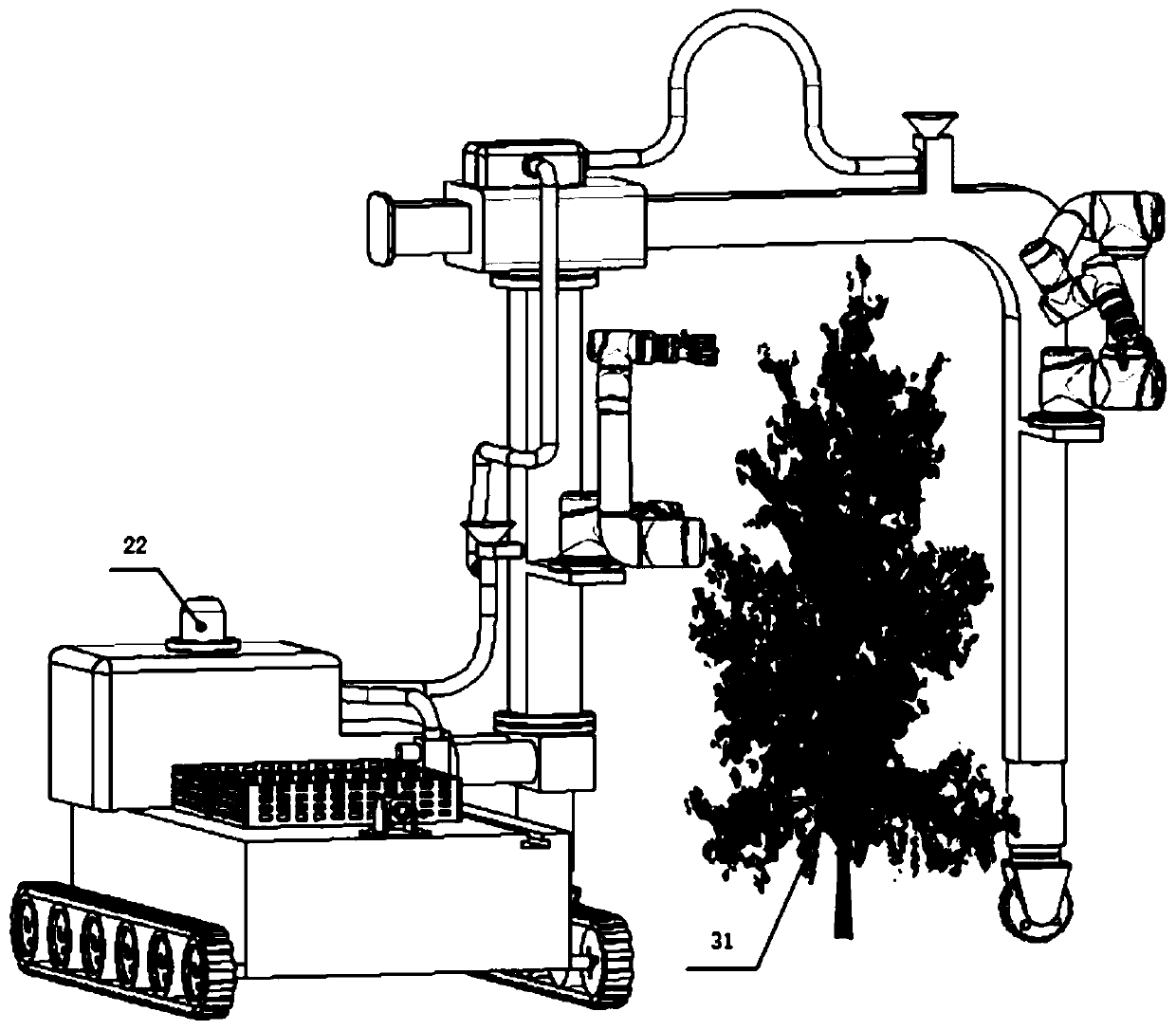
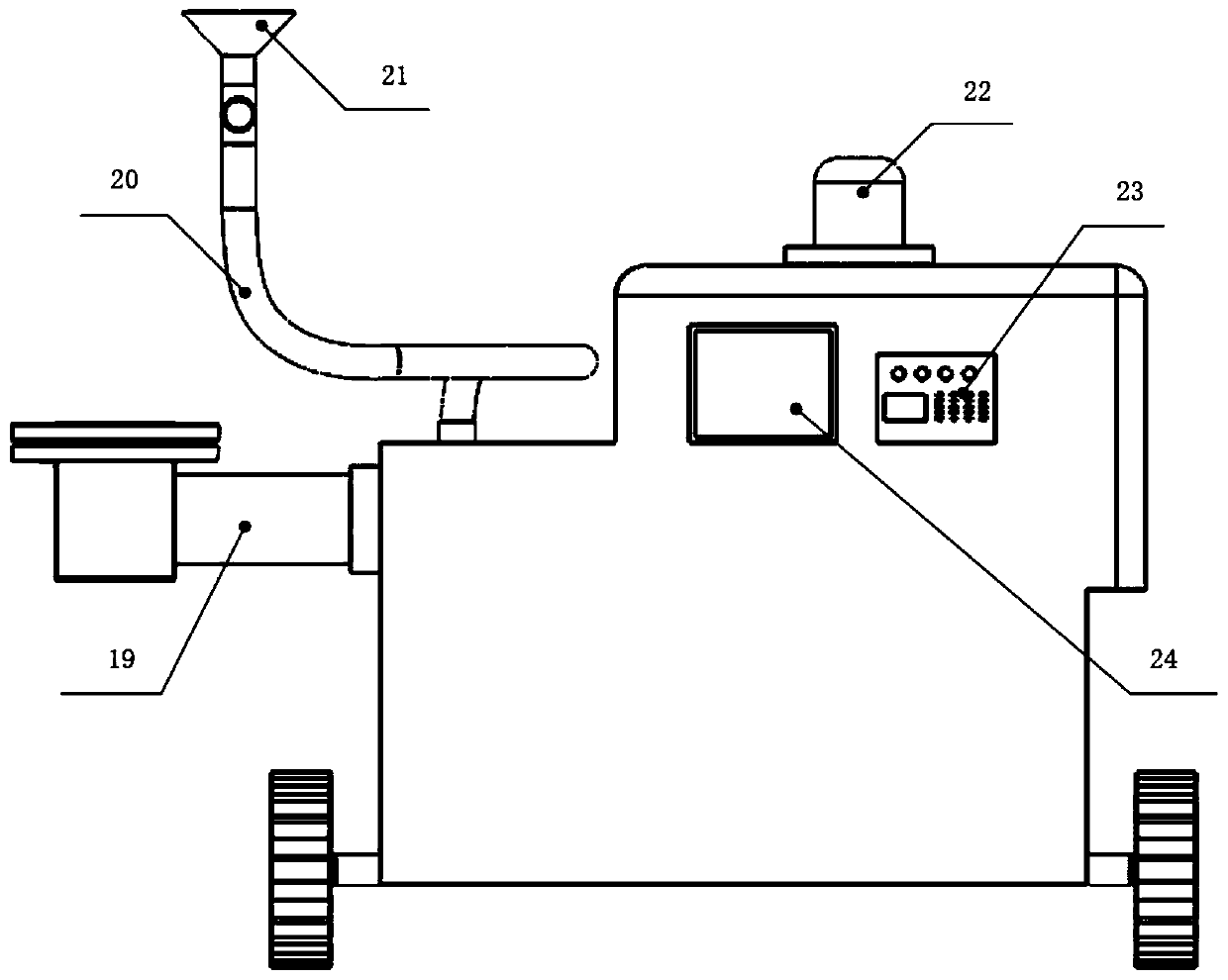
[0059] like Figure 1~5 As shown, the gantry type fruit automatic harvesting robot of the present invention includes a camera 3, a gyroscope 22, a traveling mechanism, a gantry mechanism, a harvesting mechanism and a collection system. in:
[0060] The running mechanism includes a chassis 1, crawler belts 2 and push rods 19.
[0061] Crawler belt 2 is located at chassis 1 bottom. The robot uses a crawler walking method, and the sprocket on the crawler adopts an elastic installation method, which can better adapt to the slightly undulating terrain in the field and ensure that the robot can walk more smoothly.
[0062] The push rod 19 includes a fixed end and a movable end, and the fixed end of the push rod 19 is arranged on the chassis 1 . The moving end of the push rod 19 can move laterally to the chassis 1 . The push rod 19 adopts a double push ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More