

Unmanned ship path planning method and system based on improved genetic algorithm
A technology for improving genetic algorithms and path planning, applied in the field of unmanned boat path planning methods and systems, can solve the problems of large amount of calculation of ant colony algorithm, self-intersection phenomenon of unmanned boats, combined explosion, etc., to reduce the cost of calculation time, Realize the effect of control and track correction, and improve the robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
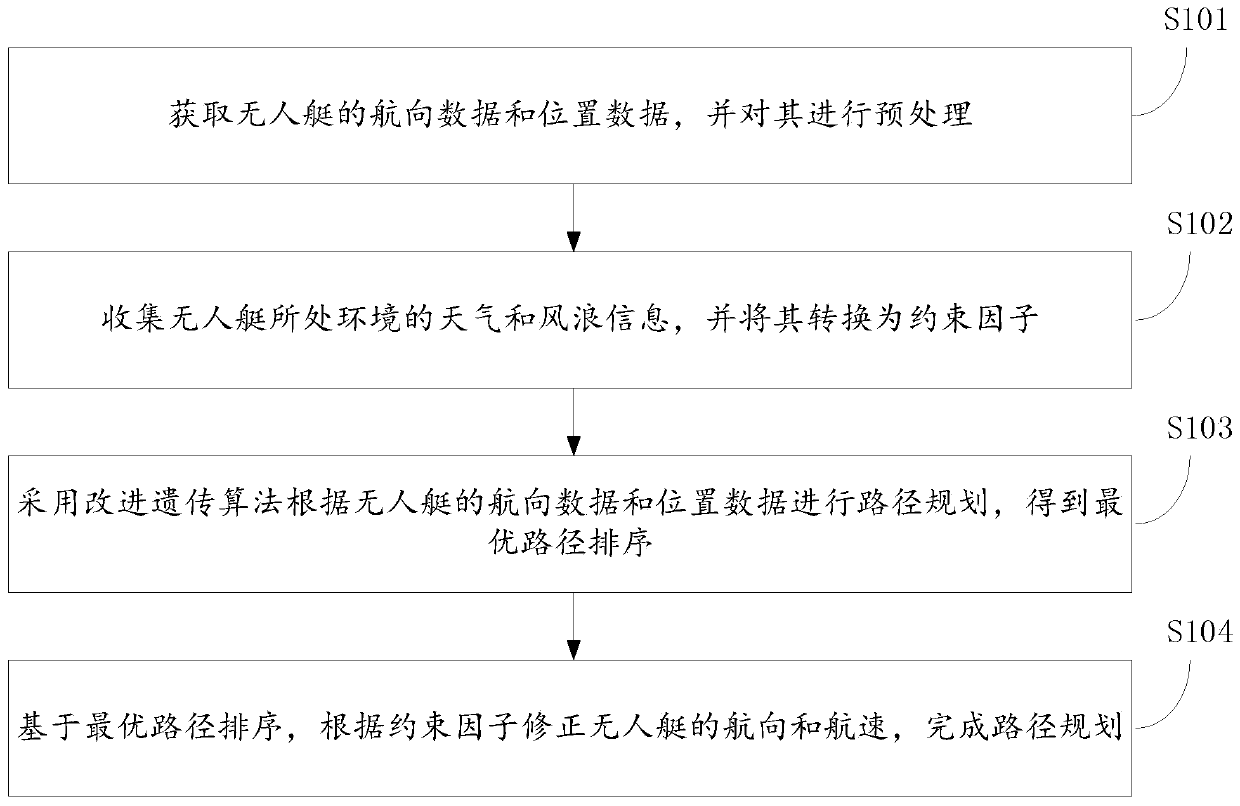
[0067] This embodiment provides a method of path planning for unmanned boats based on an improved genetic algorithm, please refer to the attached figure 1 , the method includes the following steps:
[0068] S101. Obtain heading data and position data of the unmanned boat, and perform preprocessing on them.
[0069] Specifically, the longitude and latitude coordinates of the navigation point required by the unmanned boat are obtained through GPS and the electronic compass, and the longitude and latitude coordinates of the navigation point are transformed into the horizontal and vertical coordinate values in the Cartesian coordinate system.
[0070] S102. Obtain weather and wave information of the environment where the unmanned boat is located, and convert them into constraint factors.
[0071] Specifically, the ultrasonic weather sensor collects the weather and wave information of the environment where the unmanned boat is located, including the height of the wave, the veloc...
Embodiment 2
[0135] An unmanned ship path planning system based on an improved genetic algorithm, the system includes:
[0136] The navigation data acquisition module is used to acquire the course data and position data of the unmanned boat, and preprocess it;
[0137] The constraint factor determination module is used to collect the weather and wind wave information of the environment where the unmanned boat is located, and convert it into a constraint factor;
[0138] The optimal path planning module is used to use the improved genetic algorithm to perform path planning according to the course data and position data of the unmanned boat, and obtain the optimal path sorting;
[0139] The track correction module is used to correct the course and speed of the unmanned vehicle according to the constraint factors based on the optimal path sorting, and complete the path planning.
Embodiment 3
[0141] A computer-readable storage medium, on which a computer program is stored, and when the program is executed by a processor, the following steps are realized;
[0142] Obtain the course data and position data of the unmanned boat, and preprocess it;
[0143] Collect the weather and wind and wave information of the environment where the UAV is located, and convert it into a constraint factor;
[0144] The improved genetic algorithm is used to plan the path according to the course data and position data of the unmanned vehicle, and the optimal path sorting is obtained;
[0145] Based on the optimal path sorting, the course and speed of the UAV are corrected according to the constraint factors to complete the path planning.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More