

Uncertainty-upper-bound-estimation-based discrete sliding-mode adaptive control method of aircraft
A sliding mode adaptive, uncertain technology, applied in the field of aircraft control, can solve problems such as poor practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0119] The present invention will now be further described in conjunction with the embodiments and drawings:
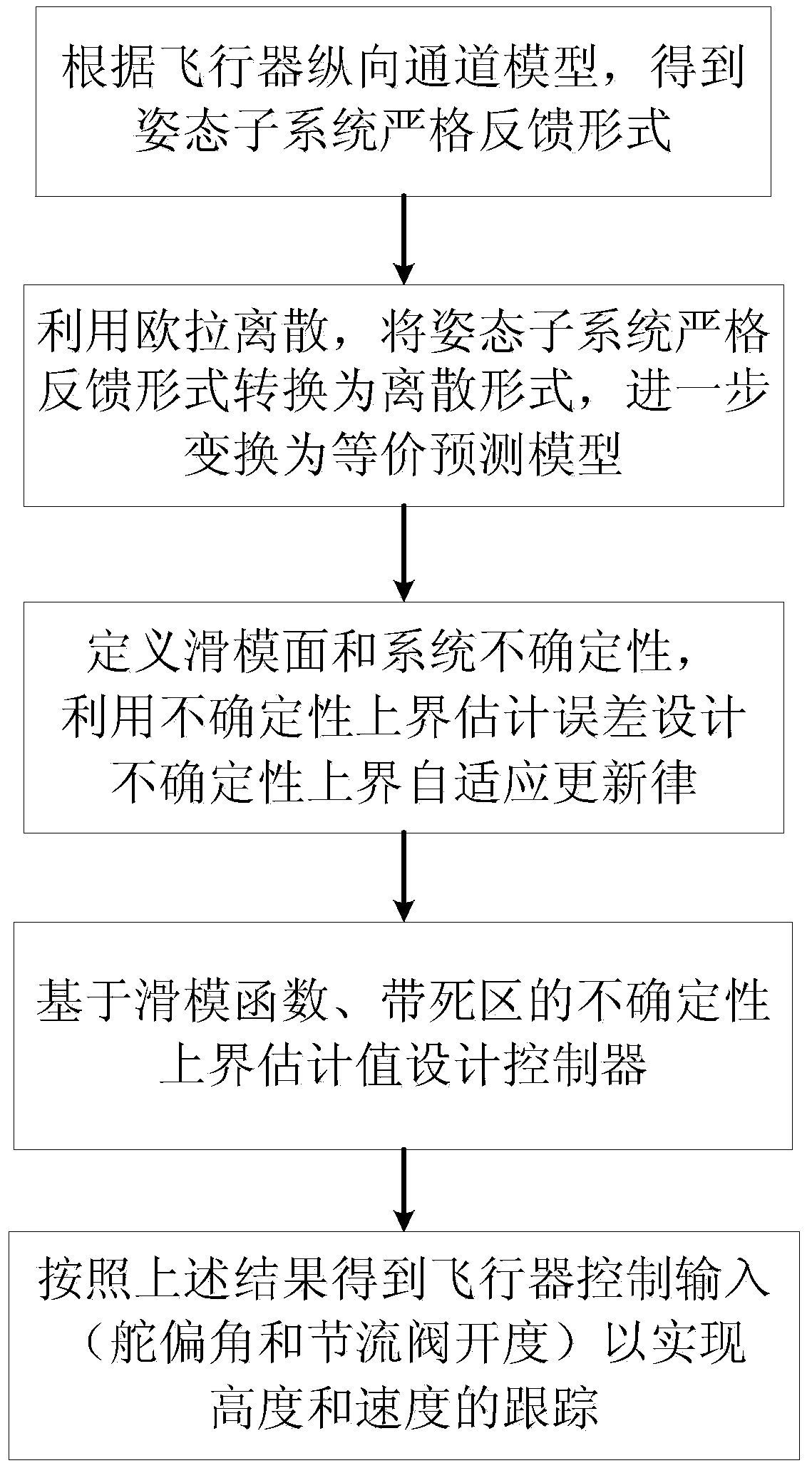
[0120] Reference figure 1 The specific steps of the discrete sliding mode adaptive control method for an aircraft based on the uncertainty upper bound estimation of the present invention are as follows:
[0121] Step 1: Consider the aircraft longitudinal channel dynamics model
[0122]
[0123]
[0124]
[0125]
[0126]
[0127] Where X s =[V,h,α,γ,q] T Is the state variable, U c =[δ e ,β] T Is the control input; V means speed, γ means track inclination, h means altitude, α means angle of attack, q means pitch speed, δ e Indicates rudder deflection angle, β represents throttle opening; T, D, L and M yy Respectively represent thrust, drag, lift and pitch rotation moment; m, I yy , Μ and r respectively represent the mass, the moment of inertia of the pitch axis, the gravitational coefficient and the distance from the center of the earth;
[0128] The torque and parameters of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More