

Explicit model predictive control method based on connected graph for three-degree-of-freedom helicopter
A model predictive control and helicopter technology, applied in adaptive control, general control system, three-dimensional position/course control, etc., can solve problems such as low computational efficiency in solving problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] The present invention will be further described below in conjunction with accompanying drawing:
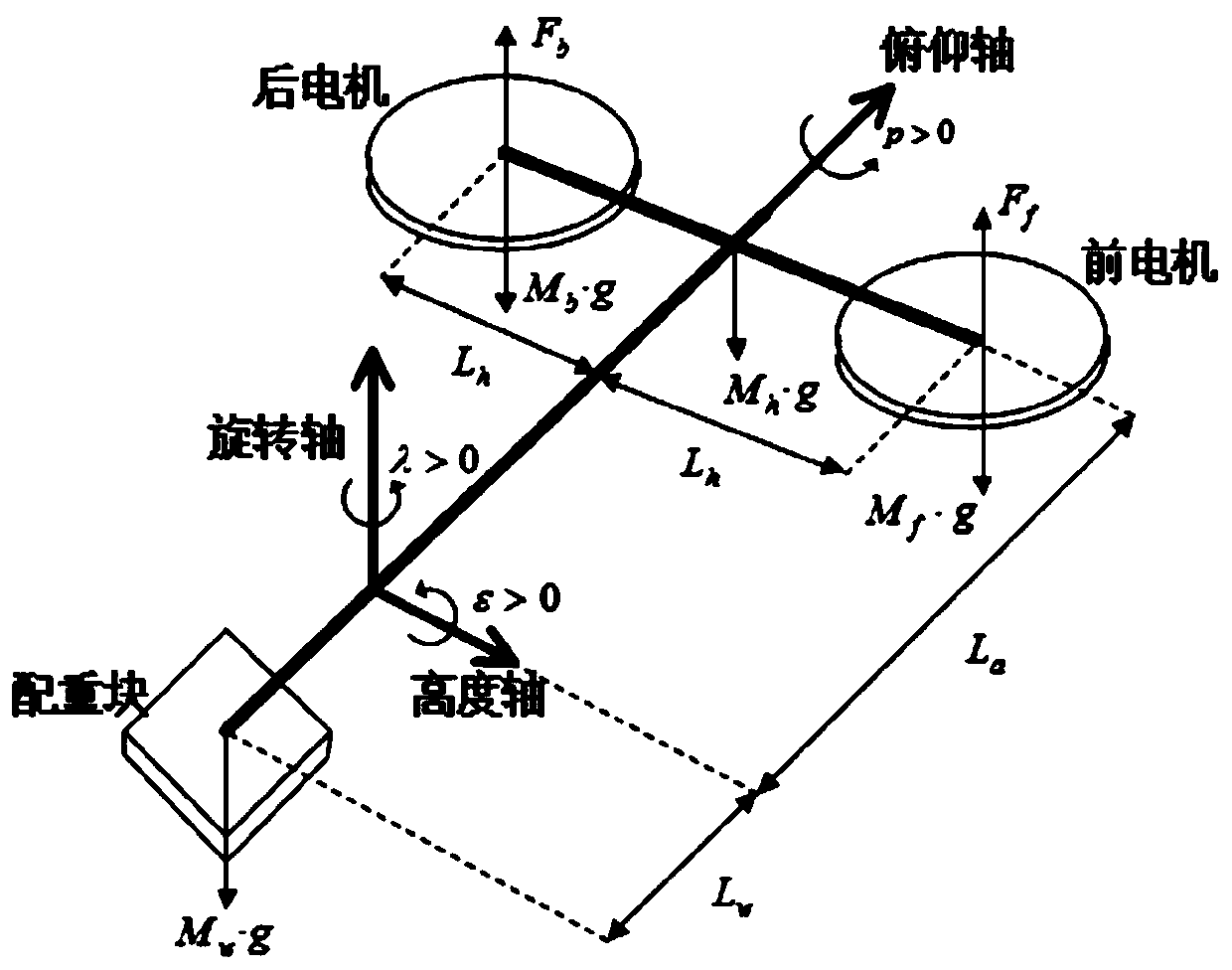
[0075] The three-degree-of-freedom helicopter connection diagram explicit predictive control method of the present invention, such as figure 1 Shown is a three-degree-of-freedom helicopter physical map, figure 2 It is a three-degree-of-freedom helicopter system model diagram, and specifically includes the following steps:
[0076] Step 1) model the helicopter system, convert its MPC problem into a multi-parameter programming problem;
[0077] The space state equation of the three-degree-of-freedom helicopter system is:
[0078]
[0079] Select altitude angle ε, pitch angle p, rotation angle r, altitude angular velocity Pitch rate and the rotational angular velocity as a state vector, that is , the voltage of the front and rear motors is used as input, that is, u=[V f V b ] T , output y=[ε p r] T . By substituting the parameter values, the coefficients of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More