

Environmental space robot heaven-earth teleoperation system with complex structure
A space robot and complex structure technology, applied in the field of simulation system, can solve the problem of incomplete environment model of space teleoperation tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
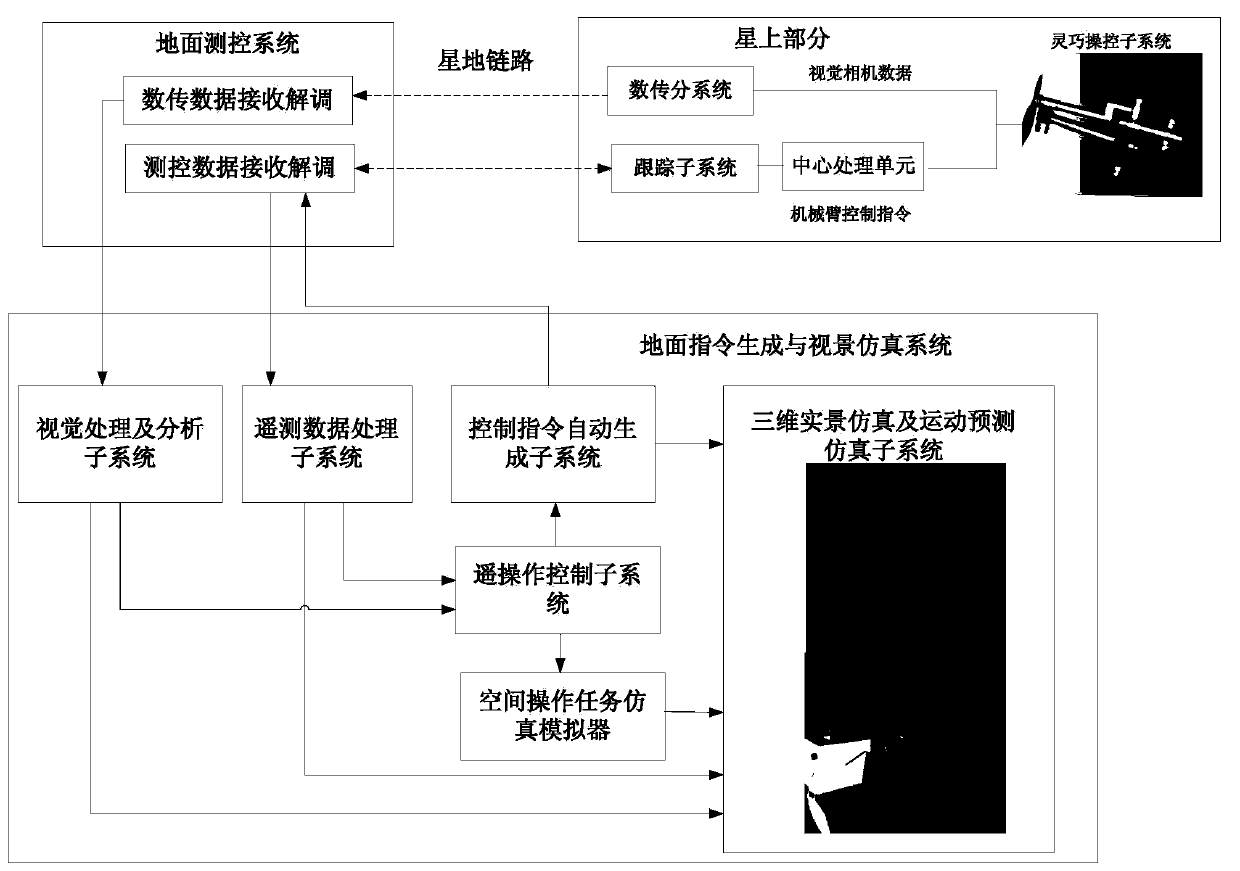
[0024] like figure 1 Shown, the present invention a kind of complicated structure environment space robot heaven-earth remote operating system, comprises software system and hardware system; Software system comprises on-star system, ground measurement and control system and ground command generation and visual simulation system; The data is transmitted to the ground command generation and visual simulation system through the ground measurement and control system, and the ground-generated commands are transmitted to the on-board system through the ground measurement system, and the on-board system executes the operation tasks according to the commands; the hardware system includes a six-degree-of-freedom air bearing platform, Five-degree-of-freedom air bearing table, multi-degree-of-freedom dexterous manipulator arm, binocular camera and laser measurement sensor, derotation and capture tools, Omega-7 operating handle and driving pedal, on-stage and off-stage controllers; six-deg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More