

Multi-mode adaptive fusion three-dimensional target detection method
A technology of three-dimensional objects and detection methods, applied in three-dimensional object recognition, character and pattern recognition, instruments, etc., can solve the problems of low detection efficiency, achieve the effect of improving efficiency, improving detection effect, and reducing input
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
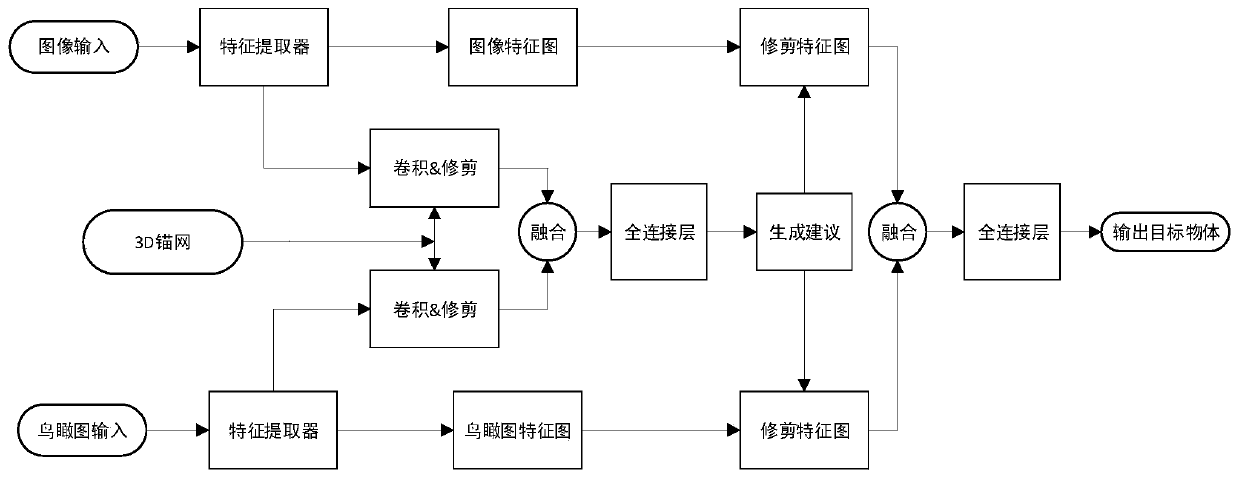
[0012] refer to figure 1 . The specific steps of the three-dimensional target detection method for multi-modal adaptive fusion of the present invention are as follows:
[0013] Step 1. Determine the various information of the input image generated from the data in the KITTI dataset, including the name of the image, the label file of the image, the ground plane equation of the image, point cloud information, and camera calibration information. Read 15 parameters from the file (KITTI dataset format): 2D label coordinates (x1, y1, x2, y2). 3D label coordinates (tx, ty, tz, h, w, l) center point coordinates and length, width and height, delete some labels according to requirements, such as removing pedestrian and cyclist labels when only training cars. Obtain the corresponding ground plane equation (a plane equation: aX+bY+cZ=d), camera calibration parameters include internal and external parameters, and point cloud ([x,....],[y,...],[ z,...]). Create a bird's-eye view image. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More