

Intelligent planning method for three-dimensional global flight path of unmanned aerial vehicle in enemy threat uncertainty environment
A technology of intelligent planning and track planning, applied in the field of unmanned aerial vehicle and intelligent navigation, it can solve the problems of inability to judge the uncertainty of the degree of danger of the path, complex terrain, and inability to directly use 3D scenes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0077] A method for intelligently planning a three-dimensional global track of an unmanned aerial vehicle under an uncertain enemy threat environment according to the present invention comprises the following steps:
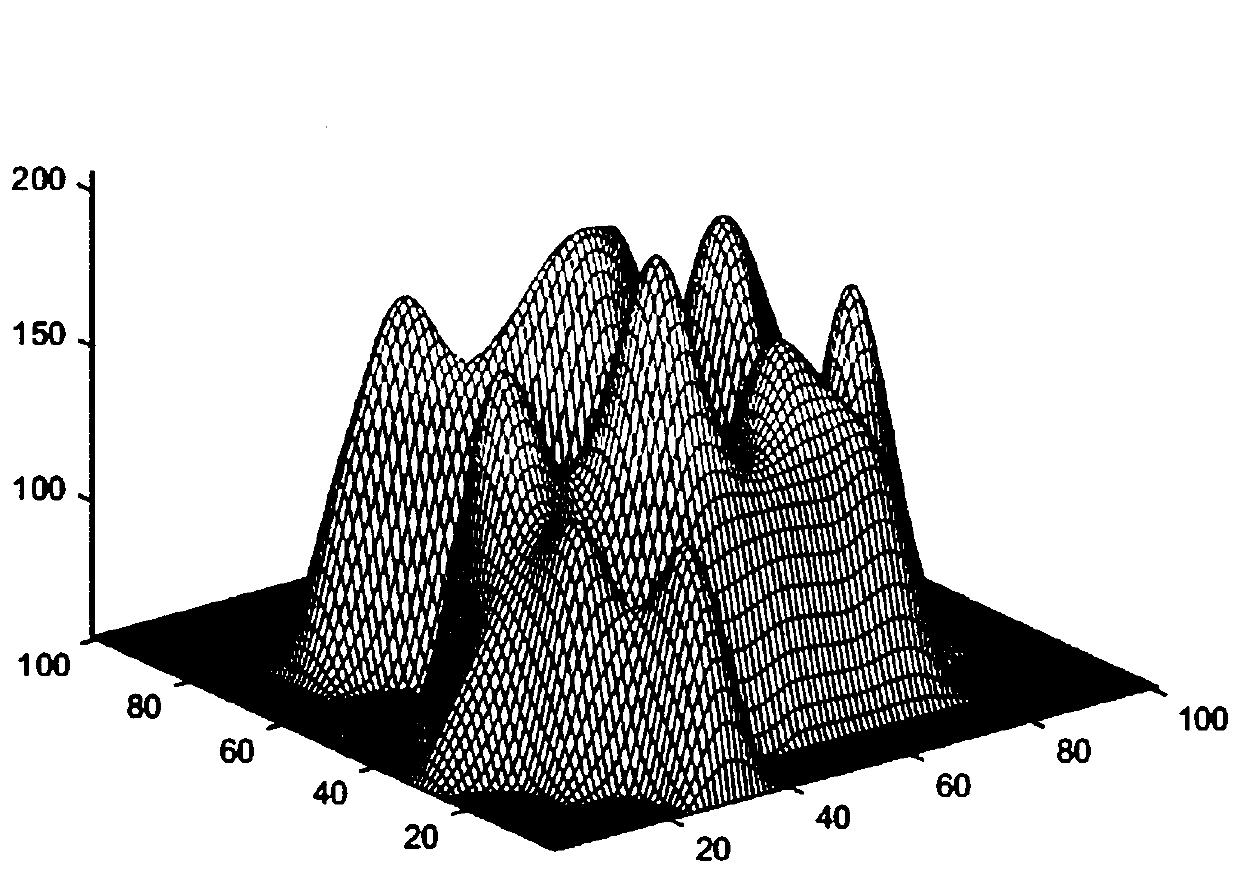
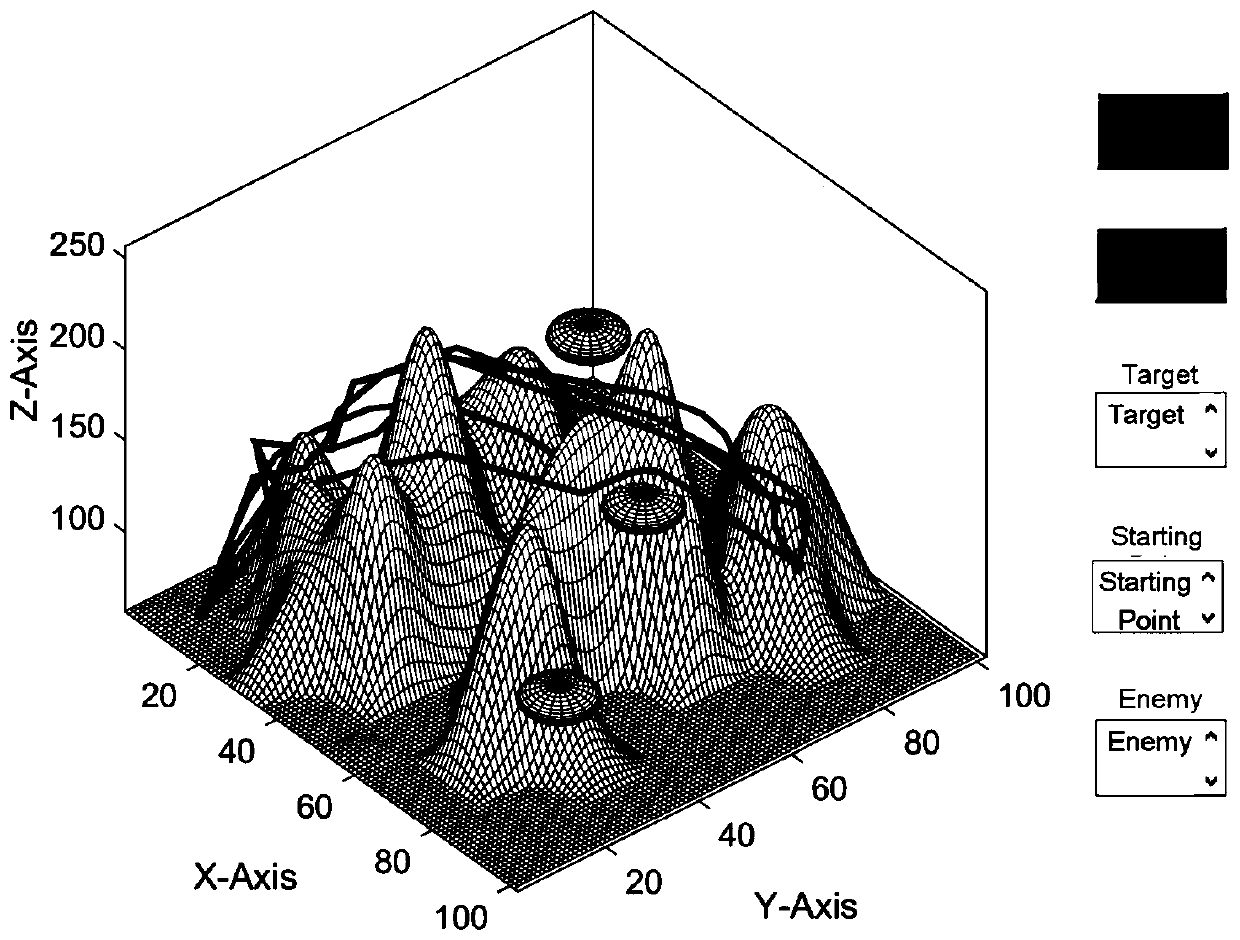
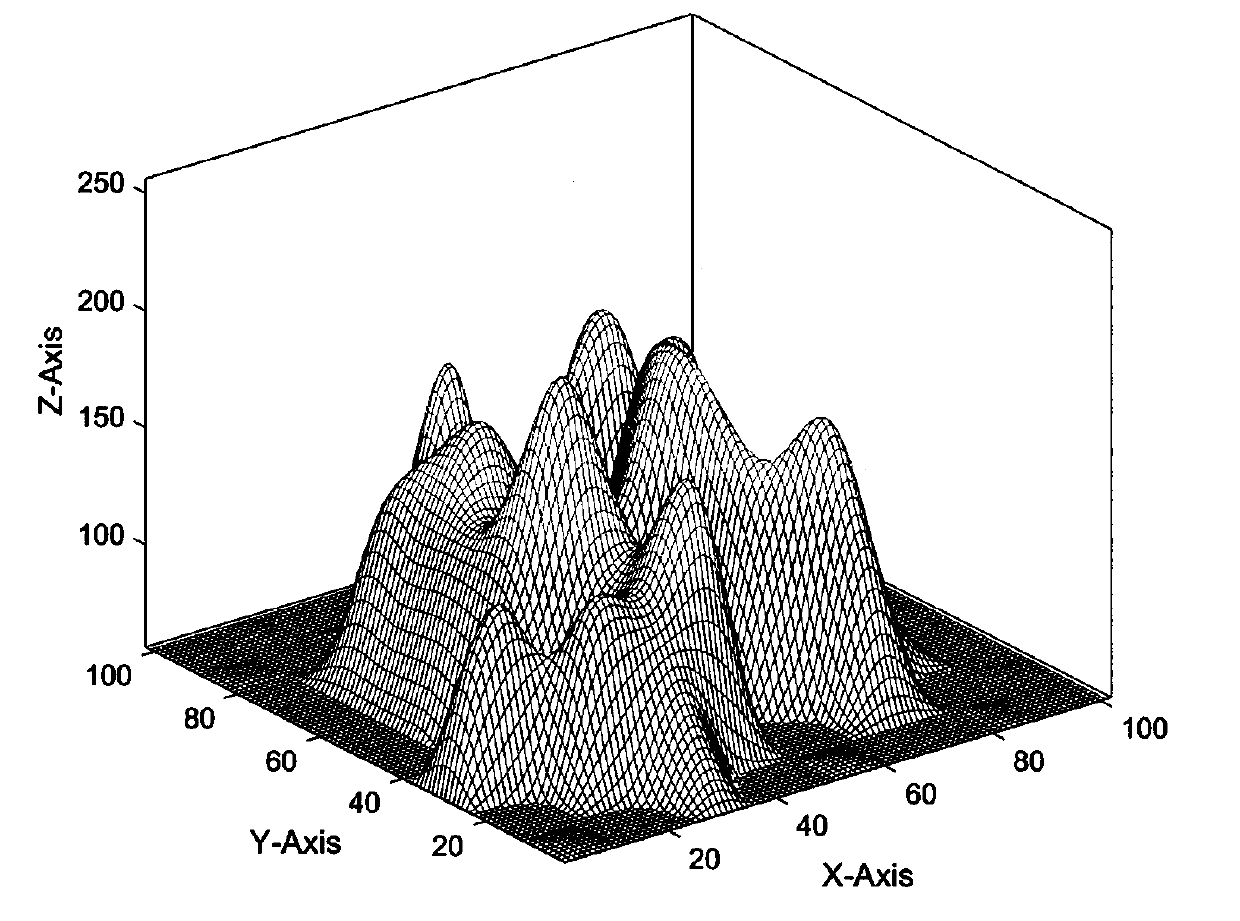
[0078] Step 1: According to the prior map and the position and shape of obstacles, the digital elevation model (DEM) technology is used to establish a three-dimensional environment simulation map of the UAV.
[0079] Step 1.1: The digital elevation model uses a set of ordered numerical arrays to represent the terrain environment. Generally speaking, the smaller the interval of the digital array corresponding to the model, the higher the accuracy of digital map sampling, the more comprehensive the map information described, and the more accurate the corresponding elevation information. The invention adopts the fu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More