

Multi-strategy adaptive lane line detection method based on stereoscopic vision
A lane line detection and stereo vision technology, applied in computer vision-related fields, can solve problems such as poor real-time performance, high false detection rate, and failure to work, achieve good order characteristics, improve robustness, and improve search speed and accuracy sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
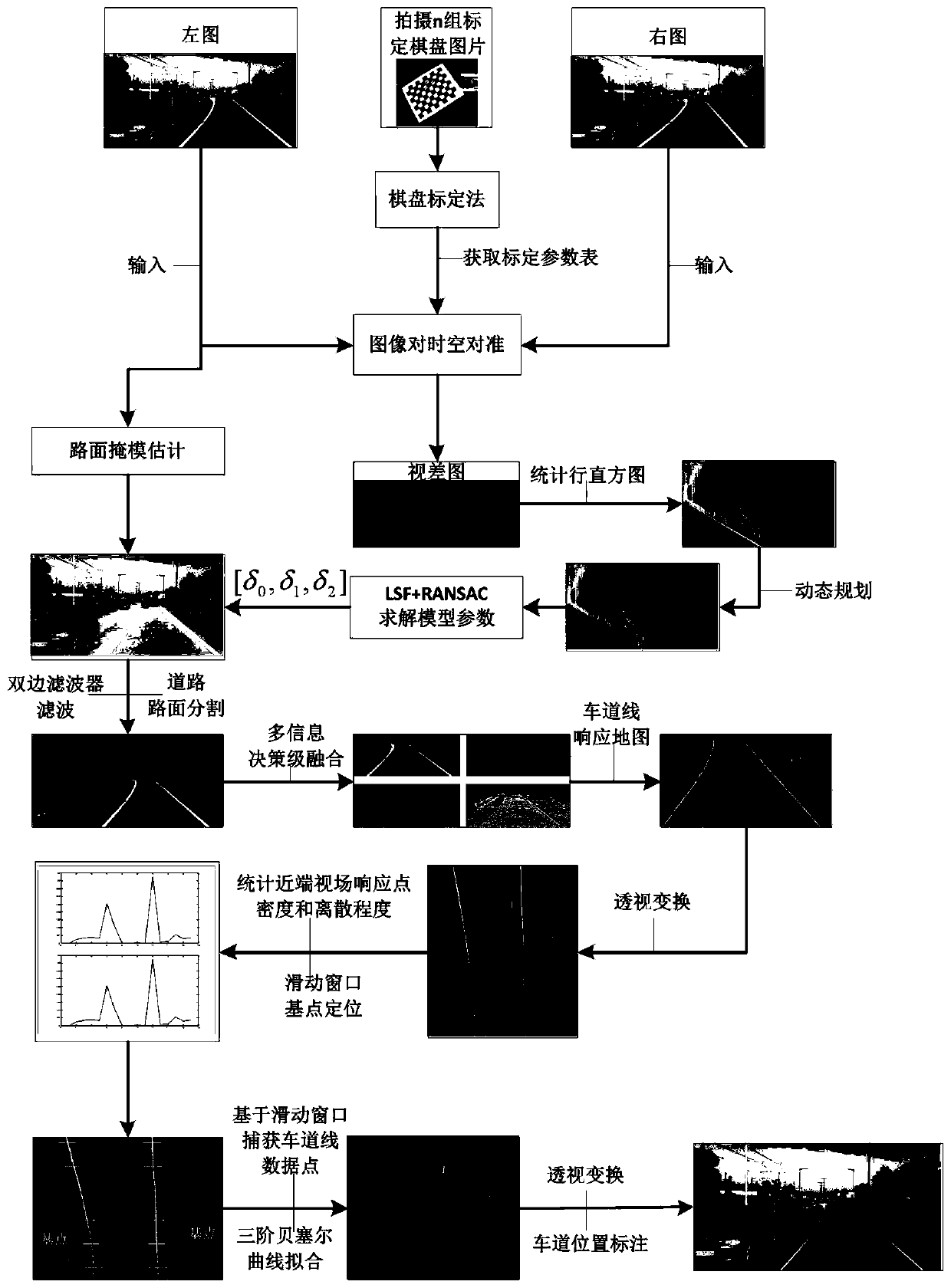
[0043] The specific implementation will be described below in conjunction with the accompanying drawings and experimental examples, figure 1 It is a flowchart of a multi-strategy adaptive lane line detection method based on stereo vision, and the specific implementation steps are as follows:
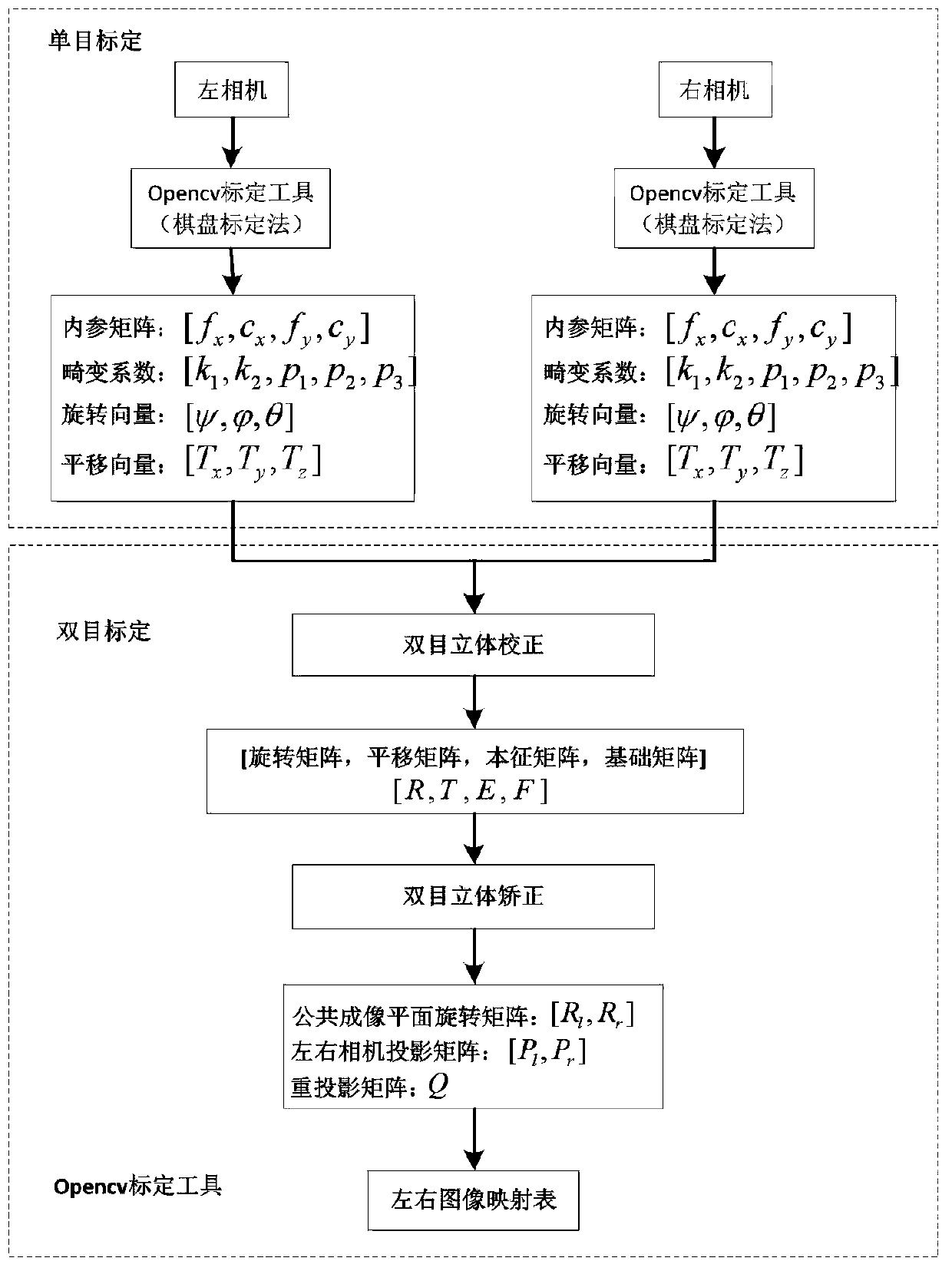
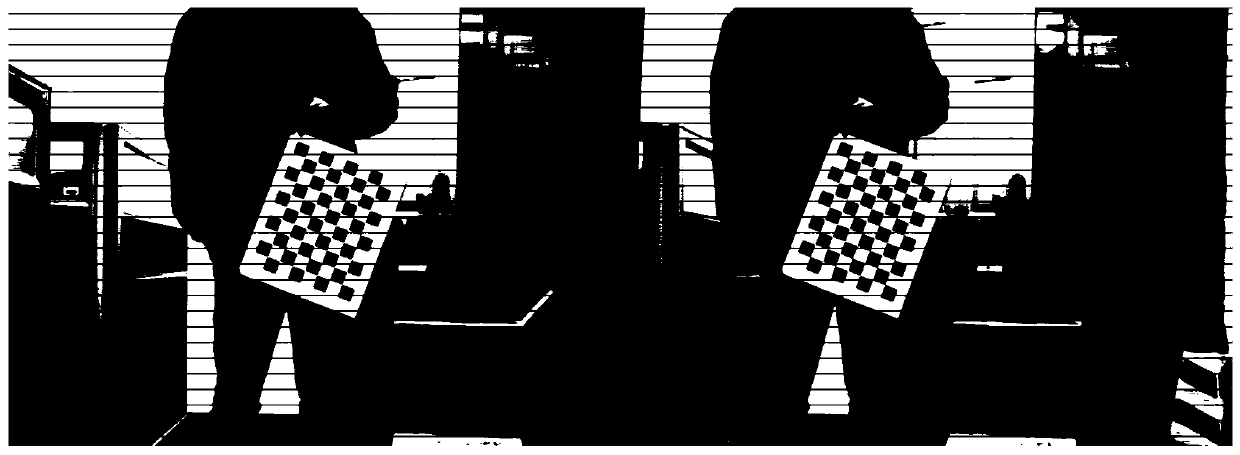
[0044] Step 1, time and space alignment of binocular cameras in offline state.
[0045] Step 1.1: Time alignment of the sequence of frames captured by the binocular camera.
[0046]Affected by factors such as the automatic exposure and automatic white balance mechanisms of industrial cameras, as well as process errors in the camera manufacturing process, the image frame sequence capture of industrial cameras is mostly asynchronous, so the binocular left and right images cannot be captured synchronously. In order to improve the dynamic accuracy of the stereo matching process, temporal alignment of the left and right cameras is required. The time alignment method adopts frame-by-frame ti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More