

Underwater robot self-adaptive regional dynamic positioning control method based on RBF neural network
An underwater robot and neural network technology, applied in the field of dynamic positioning control of underwater robots, can solve the problems of reducing the performance and life of the propeller, increasing the energy consumption of the system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
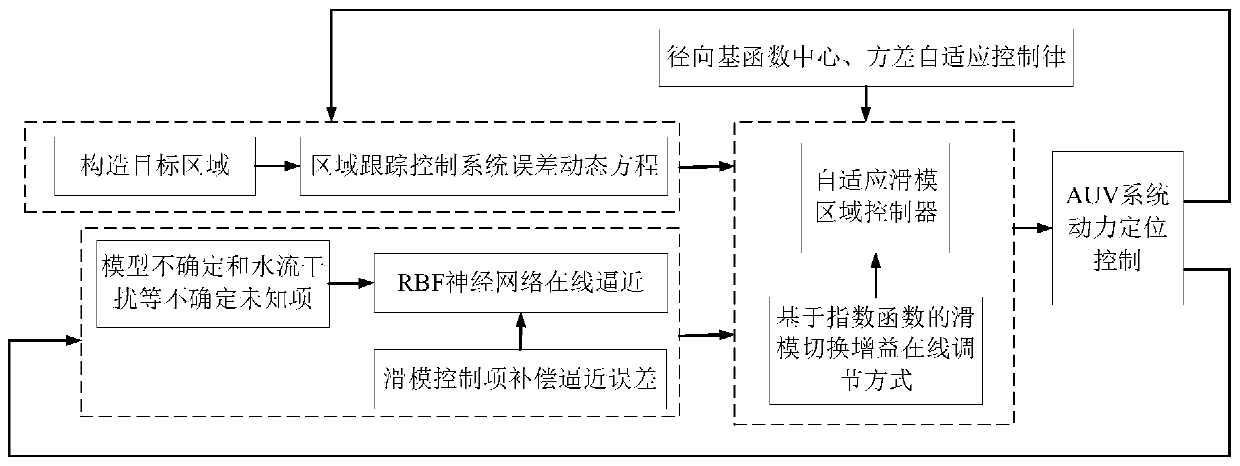
[0045] as attached figure 1 Shown, be the principle flow chart of the present invention, the specific implementation steps of the present invention are as follows:
[0046] (1) First, the AUV's 6-DOF spatial motion model can be expressed as:
[0047]
[0048]
[0049] Among them, η is the AUV position and attitude vector; τ d is the system uncertainty, including modeling uncertainty and external disturbance force, moment, etc.; τ is the control vector; J(η) is the transformation matrix.
[0050] (2) Construct the error dynamic equation of the target area and its area control system:
[0051] The AUV's 6-DOF position and attitude control accuracy index r=[r 1 ,...,r 6 ] T , and according to the control accuracy index, the target area of the 6-DOF position and attitude of the AUV is expressed as:
[0052]
[0053] in, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More