Cascading system theory-based track tracing control method of wheeled mobile robot
A mobile robot and trajectory tracking technology, applied in the direction of non-electric variable control, two-dimensional position/channel control, adaptive control, etc., can solve the problem that the state feedback controller cannot realize asymptotic tracking control, etc., and achieve convenient programming language , easy to implement, and universally applicable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be further described below in conjunction with the accompanying drawings.
[0050] Step 1: Establish the kinematics model of the wheeled mobile robot and the given expected trajectory respectively
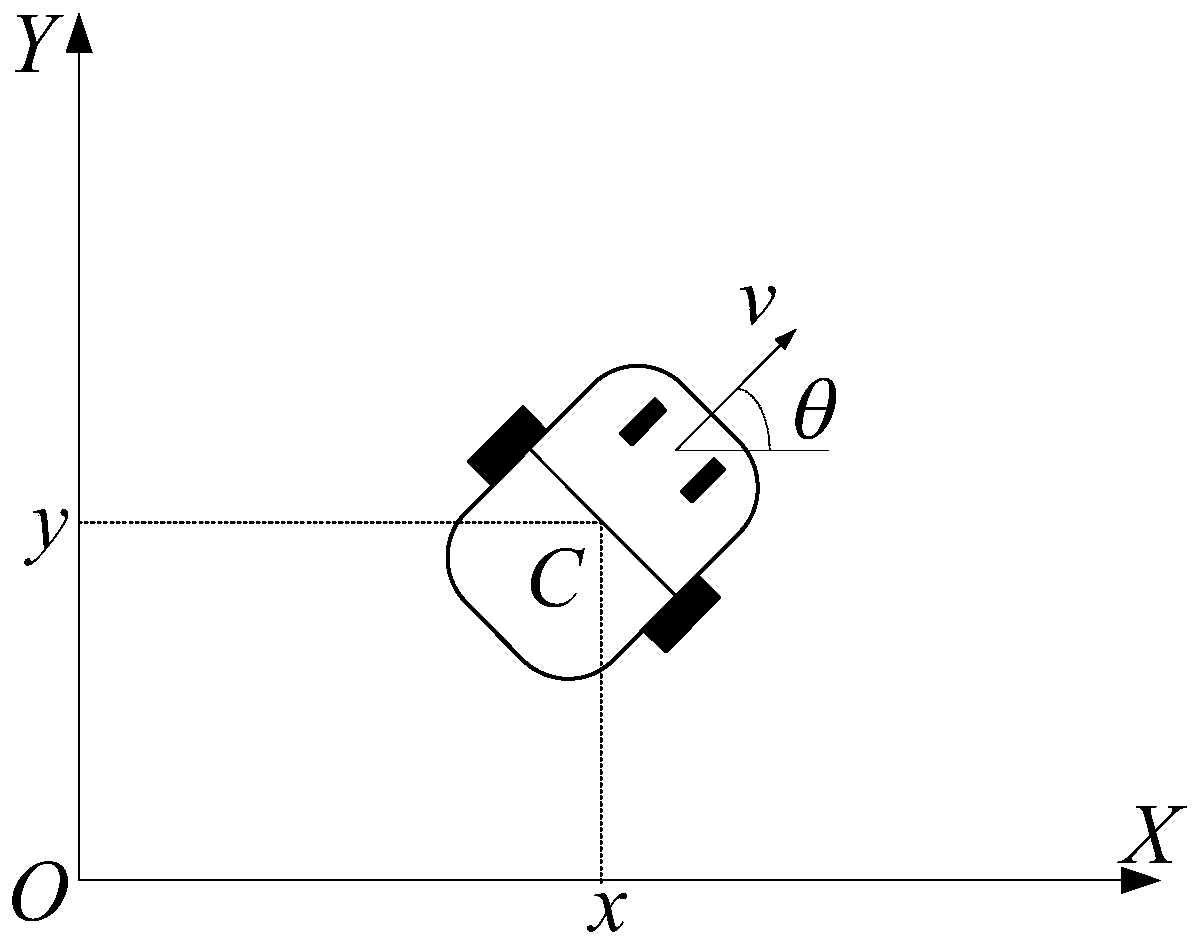
[0051] The motion model of a wheeled mobile robot is as follows: figure 1 shown. Among them, X-Y is the established Cartesian coordinate system. Point C is the center of mass of the wheeled mobile robot, (x(t), y(t)) is the Cartesian coordinate description of the center of mass of the wheeled mobile robot at time t (x(t)∈R, y(t)∈R , R is a set of real numbers), θ(t) is the deflection angle of the mobile robot’s motion direction relative to the X-axis at time t (θ(t)∈(-π,π]), v(t), ω(t) Indicates the displacement linear velocity and rotational angular velocity of the mobile robot fed back by the sensor at time t, which is used as the output signal of the closed-loop trajectory tracking error system controller.
[0052] Therefore, the kinematics ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com