

Point cloud segmentation method and device
A point cloud and point cloud data technology, applied in image analysis, image enhancement, instruments, etc., can solve problems such as long time consumption, influence of manipulator grasping accuracy, and effect of point cloud registration, so as to improve positioning accuracy, The effect of improving the efficiency of object capture and avoiding the introduction of noise points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
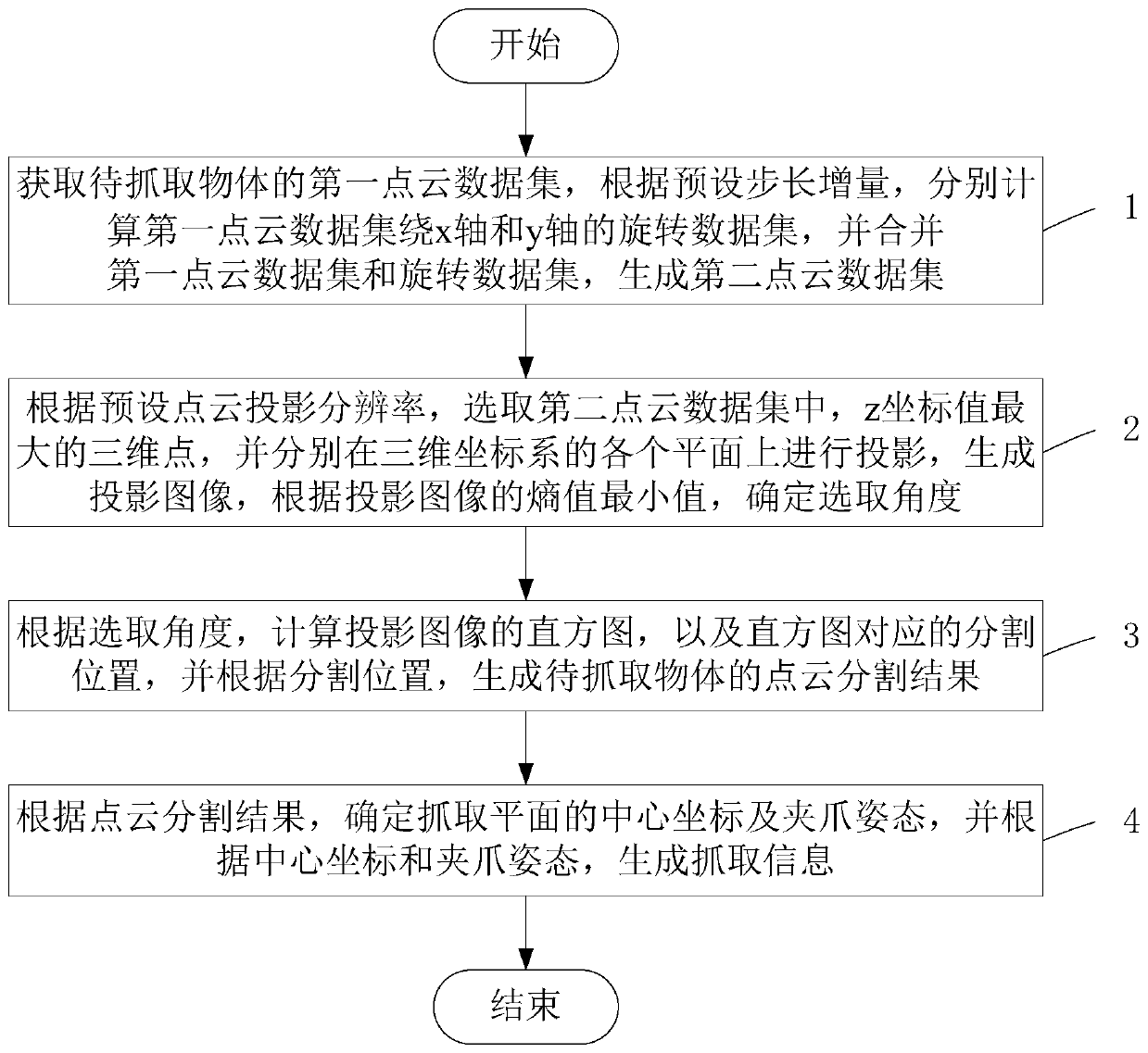
[0040] Such as figure 2 As shown, the present embodiment provides a method for point cloud segmentation, including:
[0041] Step 1, obtain the first point cloud data set P(x, y, z) of the object to be grasped, and calculate the first point cloud data set P( x, y, z) the x-axis point cloud data set rotated around the x-axis and the y-axis point cloud data set rotated around the y-axis, and the first point cloud data set P(x, y, z), x-axis The point cloud data set and the y-axis point cloud data set are merged to generate the second point cloud data set P'(x, y, z), where the x-axis point cloud data set and the y-axis point cloud data set are recorded as rotation data set.
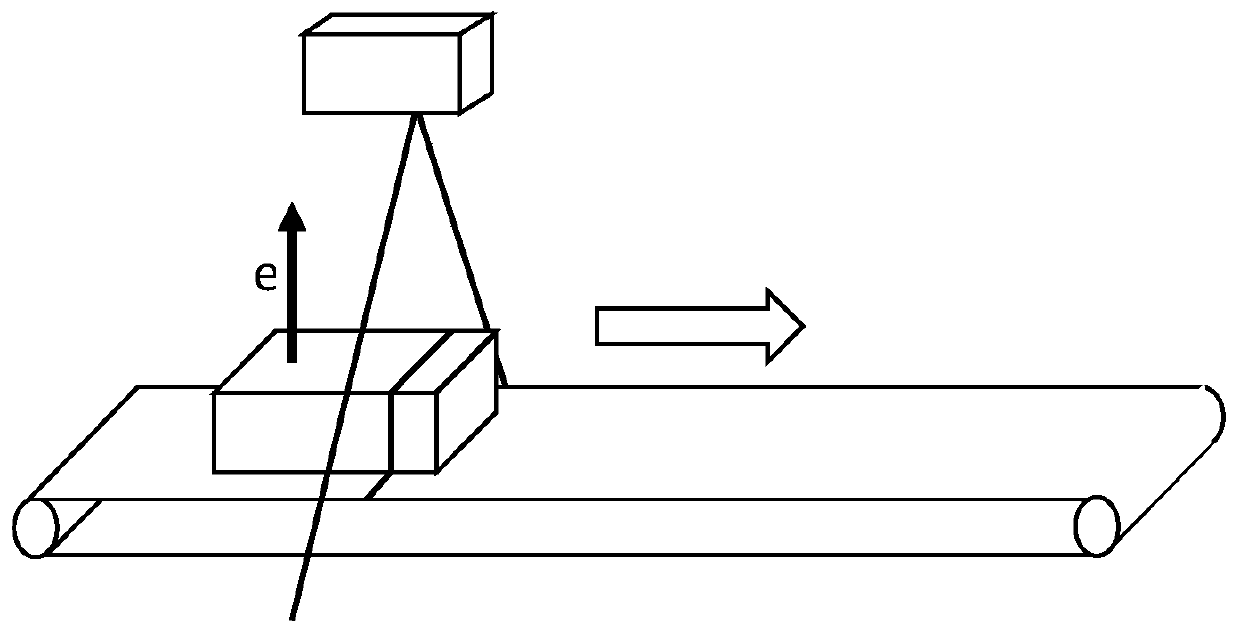
[0042] In this embodiment, the normal phase direction of the object to be grasped is set as the z-axis, its advancing direction as the y-axis, and the right side of its advancing direction as the x-axis, and a three-dimensional rectangular coordinate system is established. A single 3D sensor for a singl...
Embodiment 2
[0117] This embodiment provides a point cloud segmentation device, using the point cloud segmentation method as in the first embodiment to capture the object to be grasped, the point cloud segmentation device is arranged above the transmission device, connected to the movement mechanism, and the point cloud segmentation The device includes a three-dimensional sensor, and the three-dimensional sensor is used to perform a single scan on the object to be grasped above the conveying device to generate the first point cloud data set. The point cloud segmentation device also includes: a data set generation unit, an angle determination unit, a segmentation unit and information generating unit;
[0118] In this embodiment, the normal phase direction of the object to be grasped is set as the z-axis, its advancing direction as the y-axis, and the right side of its advancing direction as the x-axis, and a three-dimensional rectangular coordinate system is established. A single 3D sensor ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More