Input shaping residual vibration suppression method and system adapting to trajectory errors of motion system
An input shaping and motion system technology, applied in general control systems, control/regulation systems, program control, etc., can solve problems such as increasing the waiting time between processes, reducing production efficiency and accuracy, and reducing the system's response speed to commands.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
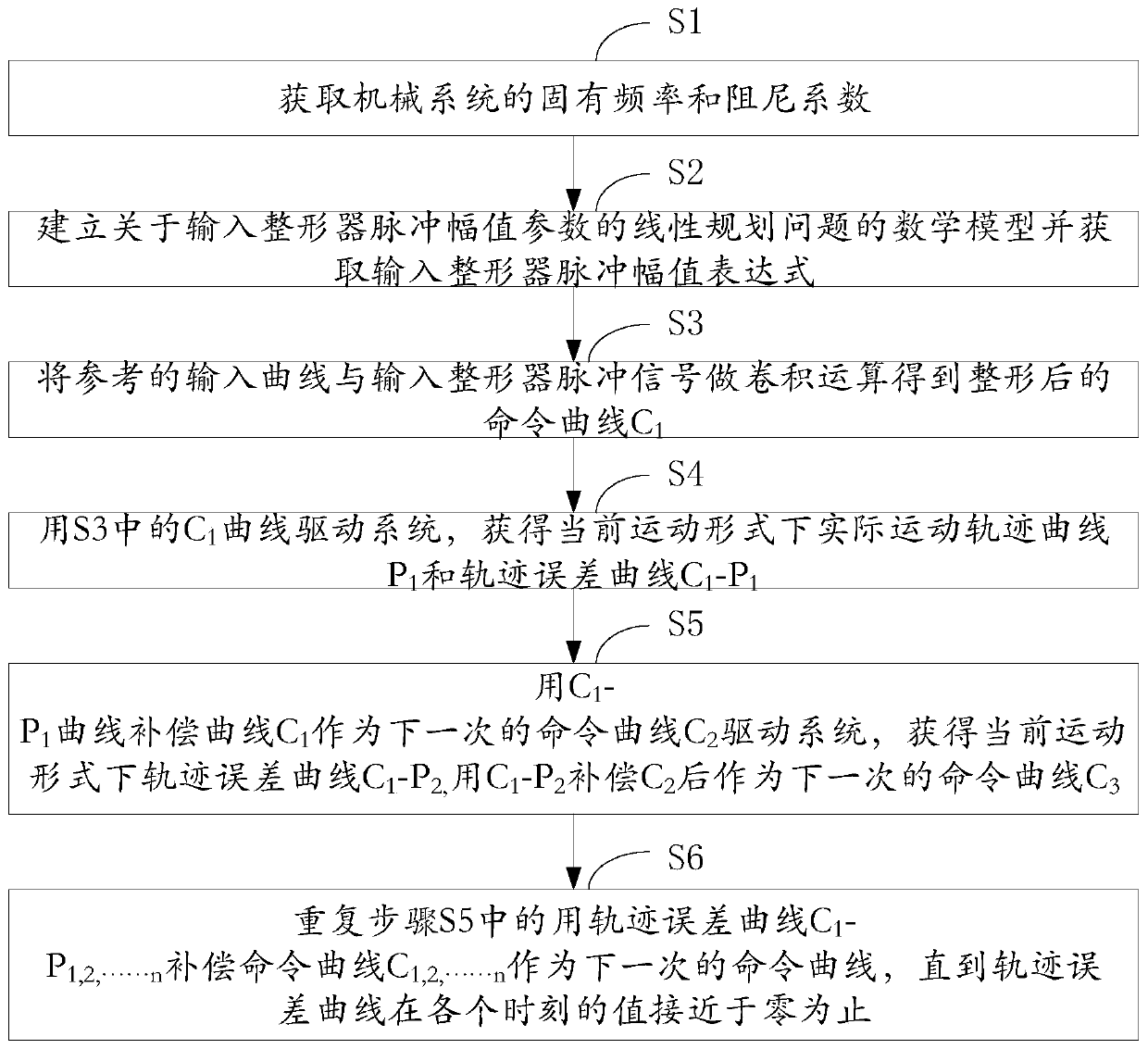
[0075] Such as figure 1 As shown, the input shaping residual vibration suppression method adapted to the trajectory error of the motion system provided by the present invention is described in detail as follows:
[0076] Step S1, get the natural frequency w of the mechanical system 0 and damping coefficient ε; obtain the natural frequency w in the mechanical system respectively 0 and damping coefficient ε.
[0077] Step S2, establishing a mathematical model of the linear programming problem about the input shaper pulse amplitude parameter and obtaining the input shaper pulse amplitude expression; establishing a mathematical model about the linear programming problem of the input shaper pulse amplitude parameter, using the impulse response The expression of the pulse amplitude of the input shaper is solved by the method; the mathematical model of the linear programming problem about the pulse amplitude parameter of the input shaper is established, and the Laplace transform is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com