

Walking aid for hip joint motion range training in orthopedics department
A hip joint and range of motion technology, which is applied in the direction of tools, sports accessories, gymnastics equipment to help people walk, etc., can solve the problem of inability to judge in real time whether the range of motion of the hip joint meets the exercise requirements, lack of stride range, and inability to accurately control the front. Flexibility and other issues to achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
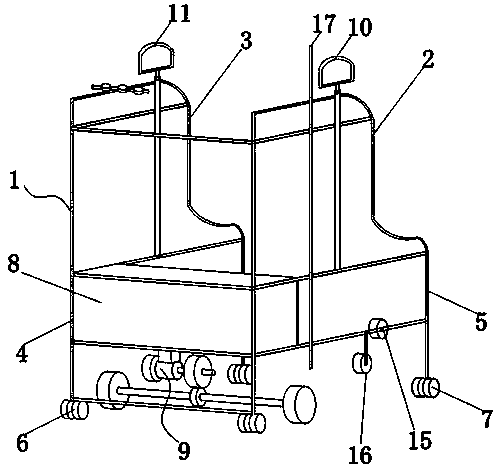
[0028] like Figure 1-5As shown, a walking aid for orthopedic hip joint activity exercise includes a bracket 1, and the bracket 1 includes a symmetrical left bracket 2 and a right bracket 3 to support the weight of the human body. The left bracket 2 and the right bracket 3 are provided with The front outrigger 4 and the rear outrigger 5, the bottom of the front outrigger 4 is equipped with a universal wheel 6, the universal wheel 6 can change the walking direction of the walker under the action of external force, which is convenient for the patient to use the walker to turn, the rear outrigger 5 Fixed wheels 7 are provided at the bottom to facilitate the movement of the walker; a storage box 8 is provided between the left bracket 2 and the right bracket 3 for installing electrical components; a cushion is provided above the storage box 8, and when the patient is tired from exercising It can be used as a seat to provide rest. The storage box 8 is made of 5 mm thick stainless st...
Embodiment 2
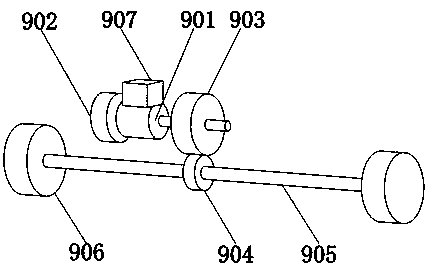
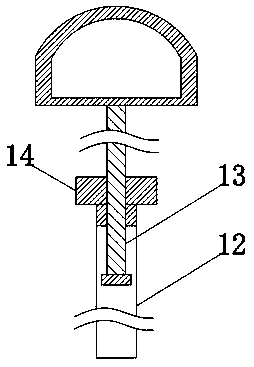
[0030]When using a walker for orthopedic hip joint mobility exercise: measure the height H of the hip joint with reference to the scale 17, adjust the height of the left armrest 10 and the right armrest 11, so that both are at the same height as the hip joint, and the patient passes the left armrest with both hands. The armrest 10 and the right armrest 11 support the body weight and stand in the walker, and input the value H into the controller through the control panel, and then input the hip joint forward flexion angle α into the controller according to the patient's postoperative time and physical condition, After all preparations are finished, the patient presses the start button in front of the right handrail 11 with his right hand, the stepper motor 901 starts, and the brake 902 releases the output shaft of the drive motor at the same time, the stepper motor 901 runs under the control of the controller and drives the walker Advance the distance L, the controller stops the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More