

Global positioning method based on geometric information
A positioning method and technology of geometric information, applied in the field of global positioning based on geometric information, can solve problems such as electromagnetic interference, mismatching, multi-path effects, etc., and achieve the effect of good positioning effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
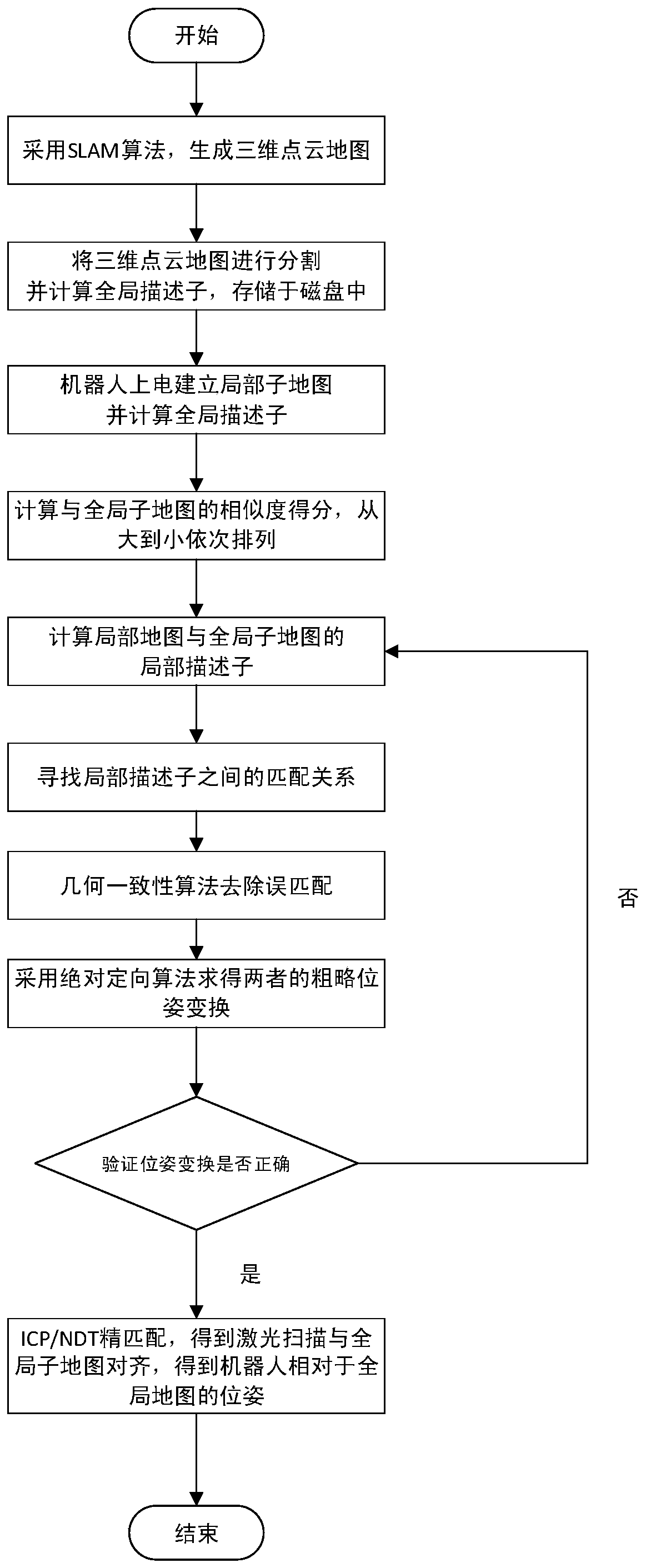
[0031] A global positioning method based on geometric information, such as figure 1 shown, including the following steps:
[0032] Step 1: Obtain the current perception information of the mobile robot for self-positioning, and use real-time positioning and map construction algorithms to generate a 3D point cloud map of the environment in advance;
[0033] The mobile robot is equipped with a laser range finder and a ROS operating system; the laser range finder is connected to the rigid body of the robot for building a map and doing global positioning based on the map. In this embodiment, VLP-16 laser radar is used, and the laser is The smallest three-dimensional laser pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More