

A robot spraying trajectory planning method based on large complex surface model
A technology of complex curved surface and trajectory planning, applied in the direction of injection device, design optimization/simulation, etc., which can solve the problems of linkage control difficulty, cost increase, and cost increase.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
[0049] The robot spraying trajectory planning method based on a large complex curved surface model disclosed by the present invention first performs digital-analog off-line planning, and then performs actual spraying planning;
[0050] The specific steps of the digital-analog offline planning process are as follows:
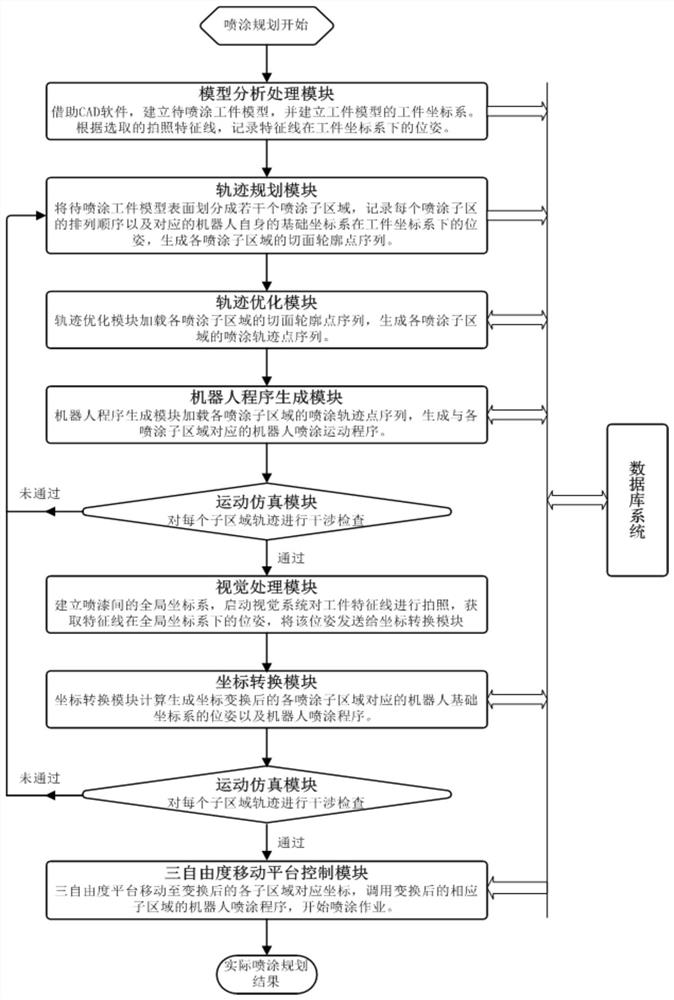
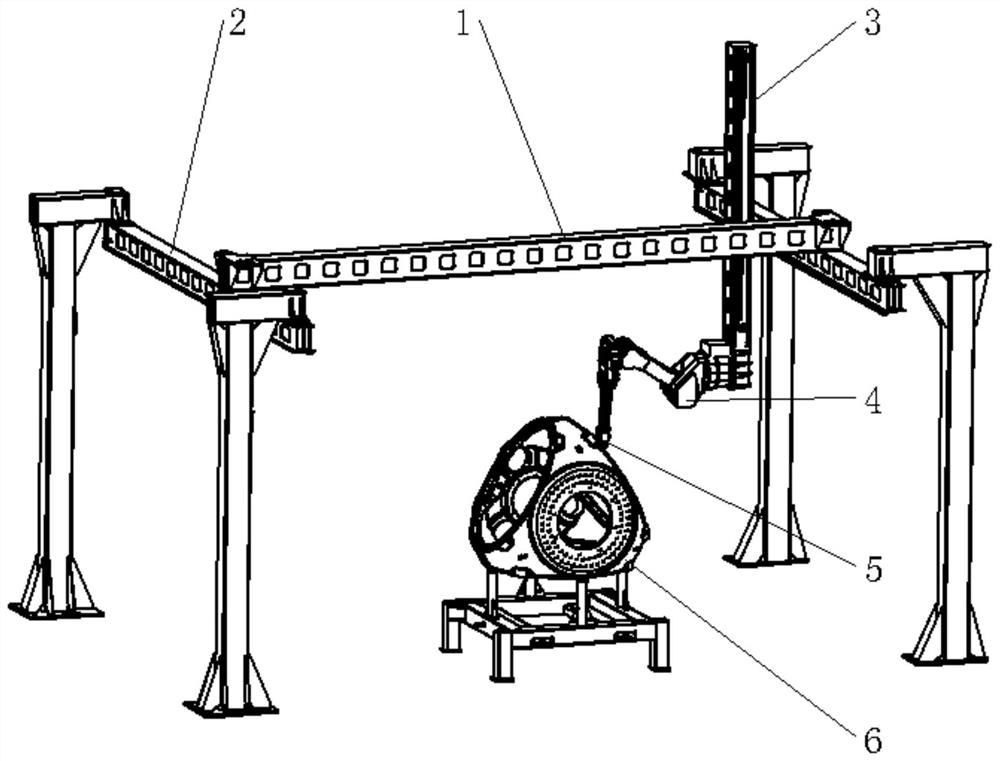
[0051] Step 1, such as figure 1 As shown in the first part of the flow chart, according to the assembly relationship between the X, Y, Z three-degree-of-freedom mobile platform and the robot used in the actual spraying, as well as the assembly relationship between the spraying tool and the robot, the following is established in the CAD software: figure 2 The X, Y, Z three-degree-of-freedom mobile platform model, robot model and spray gun tool model are shown. Among them, the base of the robot model is fixedly connected with the bottom...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More