

Recursive fuzzy neural network nonsingular terminal sliding mode control method of micro gyroscope
A fuzzy neural network, non-singular terminal technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the complex debugging, reduce the sensitivity and accuracy of the gyroscope system, and the characteristics of the original are easily affected by environmental changes and other problems to achieve the effect of ensuring the driving frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be further described below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
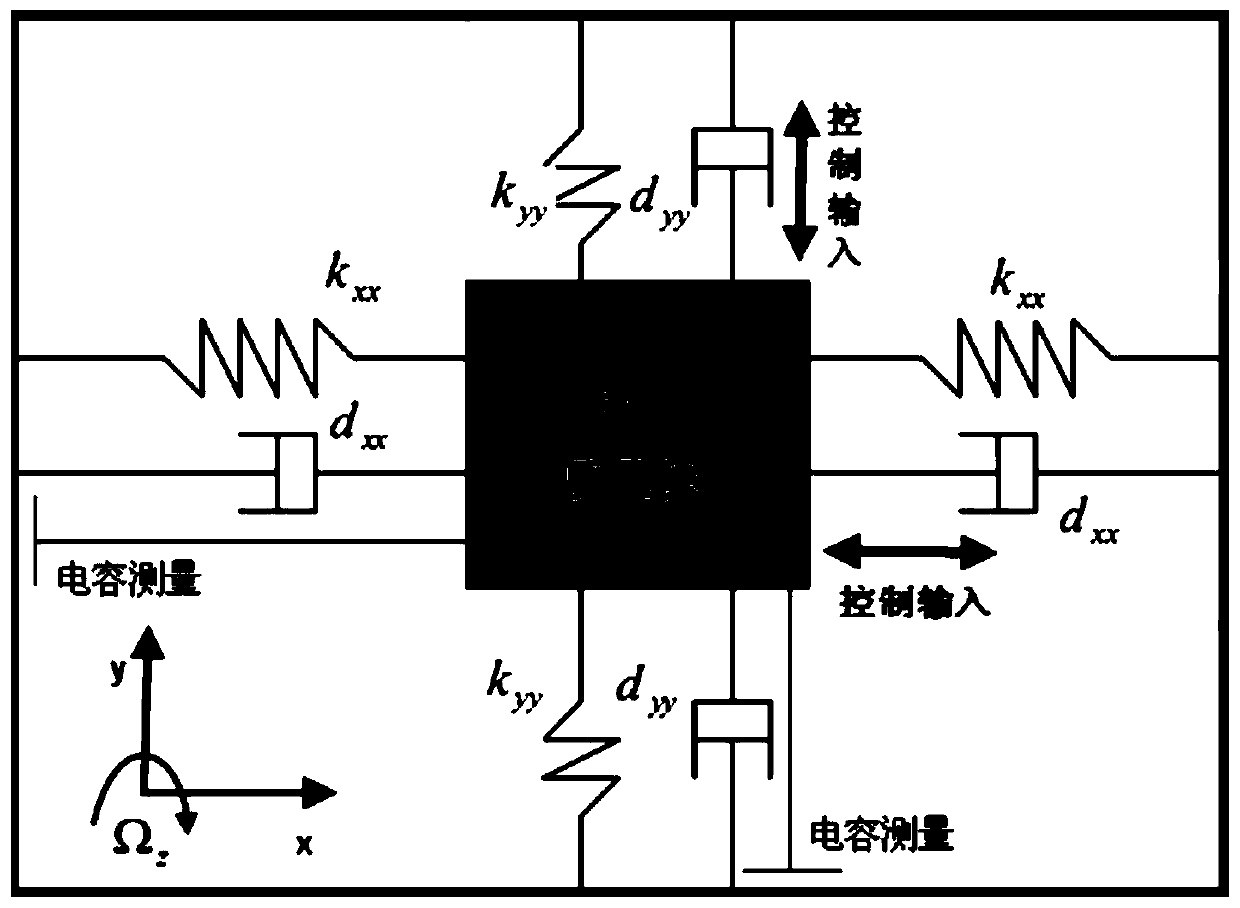
[0048] 1. Mathematical model of micro gyroscope:
[0049] A micro gyroscope usually consists of three parts: a mass suspended by an elastic material support, an electrostatic drive device, and a sensing device. This can be simplified as figure 1 The shown is a damped oscillation system composed of a mass block and a spring. According to the Coriolis effect, when the mass block m is in simple harmonic motion driven by a periodic electrostatic force, if the z-axis detects the input from the angular velocity Ω, The mass will vibrate on the Y axis. Considering that the angular velocity in the z-axis direction of the micro-gyroscope will produce dynamic coupling between the X-axis and the Y-axis, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More