

Control method of multi-freedom-degree industrial robot based on single chip microcomputer
An industrial robot and control method technology, applied in the field of control, can solve problems such as complex execution process and insufficient efficiency, and achieve the effect of simple control method, cost saving and cost reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the technical solutions of the present invention clearer and clearer to those skilled in the art, the present invention will be further described in detail below in conjunction with the examples and accompanying drawings, but the embodiments of the present invention are not limited thereto.
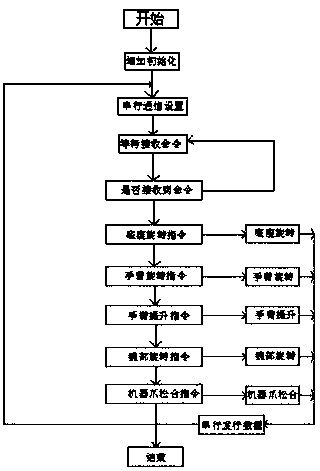
[0029] Such as figure 1 As shown, the control method of a multi-degree-of-freedom industrial robot based on a single-chip microcomputer provided in this embodiment is applied to a single-chip microcomputer, and is characterized in that it includes the following steps:
[0030] Step 1: port initialization;
[0031] Step 2: Perform serial communication settings;
[0032] Step 3: Wait for the command to be received; judge whether the command is received, enter step 4 if the command is received, reset to wait for the command if the command is not received
[0033] Step 4: Get the command to judge the command category;
[0034] Step 5: Send the corresponding control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More